
Verwandte Anleitungen für Beckhoff EP1518-0001





Inhaltszusammenfassung für Beckhoff EP1518-0001
- Seite 1 Dokumentation EP1518-0002 EtherCAT Box mit 8 digitalen Eingängen und 2 Zählern Version: 2.1.0 Datum: 05.12.2018...
-
Seite 3: Inhaltsverzeichnis
Inhaltsverzeichnis Inhaltsverzeichnis 1 Vorwort ............................... 5 Hinweise zur Dokumentation ...................... 5 Sicherheitshinweise ........................... 6 Ausgabestände der Dokumentation .................... 7 2 Produktübersicht ............................ 8 EtherCAT Box - Einführung ....................... 8 EP1518 - Einführung ........................ 10 EP1518 - Technische Daten...................... 11 EP1518 - Prozessabbild ........................ 12 3 Installation.............................. 14 Montage............................ 14 3.1.1 Abmessungen........................ 14 3.1.2 Befestigung........................ - Seite 4 Inhaltsverzeichnis Allgemeine Betriebsbedingungen .................... 70 EtherCAT Box- / EtherCAT-P-Box - Zubehör .................. 71 Support und Service ........................ 72 Version: 2.1.0 EP1518-0002...
-
Seite 5: Vorwort
Patente: EP0851348, US6167425 mit den entsprechenden Anmeldungen und Eintragungen in verschiedenen anderen Ländern. ® EtherCAT ist eine eingetragene Marke und patentierte Technologie lizensiert durch die Beckhoff Automation GmbH, Deutschland. Copyright © Beckhoff Automation GmbH & Co. KG, Deutschland. Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts sind verboten, soweit nicht ausdrücklich gestattet. -
Seite 6: Sicherheitshinweise
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software- Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der Beckhoff Automation GmbH & Co. KG. Qualifikation des Personals Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-, Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist. -
Seite 7: Ausgabestände Der Dokumentation
Vorwort Ausgabestände der Dokumentation Version Kommentar 2.1.0 • Sicherheitshinweise neues Layout • Update Kapitel Montage 2.0.0 • Migration • Kapitel Grundlagen zur Funktion korrigiert 1.1.0 • Power-Anschluss aktualisiert 1.0.0 • Erste Veröffentlichung Firm- und Hardware-Stände Diese Dokumentation bezieht sich auf den zum Zeitpunkt ihrer Erstellung gültigen Firm- und Hardware- Stand. -
Seite 8: Produktübersicht
Produktübersicht Produktübersicht EtherCAT Box - Einführung Das EtherCAT-System wird durch die EtherCAT-Box-Module in Schutzart IP67 erweitert. Durch das integrierte EtherCAT-Interface sind die Module ohne eine zusätzliche Kopplerbox direkt an ein EtherCAT- Netzwerk anschließbar. Die hohe EtherCAT-Performance bleibt also bis in jedes Modul erhalten. Die außerordentlich geringen Abmessungen von nur 126 x 30 x 26,5 mm (H x B x T) sind identisch zu denen der Feldbus Box Erweiterungsmodule. -
Seite 9: Abb. 2 Ethercat Box Mit M8-Anschlüssen Für Sensor/Aktoren
Eine detaillierte Beschreibung des EtherCAT-Systems finden Sie in der System Basis-Dokumentati- on zu EtherCAT, die auf unserer Homepage (www.beckhoff.de) unter Downloads zur Verfügung steht. XML-Dateien XML -Dateien (XML Device Description Files) zu EtherCAT-Modulen von Beckhoff finden Sie unter auf unserer Homepage (www.beckhoff.de) unter Downloads im Bereich Konfigurations-Dateien. EP1518-0002 Version: 2.1.0... -
Seite 10: Ep1518 - Einführung
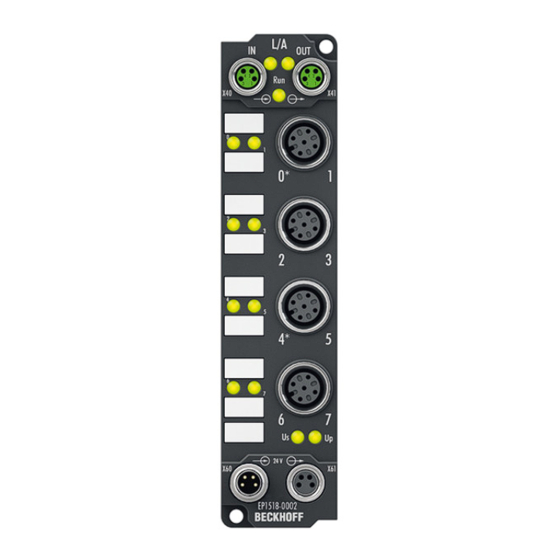
Produktübersicht EP1518 - Einführung Abb. 4: EP1518-0001 und EP1518-0002 8 digitale Eingänge (24 V ), zwei Zähler Die EtherCAT-Box EP1518-0002 mit digitalen Eingängen erfasst binäre Steuersignale aus der Prozessebene und übertragen sie galvanisch getrennt zur Steuerung. Der Signalzustand wird über Leuchtdioden angezeigt. Der Anschluss erfolgt über M12-Steckverbinder. Die Eingangsfilter können über EtherCAT zwischen 0 und 100 ms eingestellt werden. -
Seite 11: Ep1518 - Technische Daten
Produktübersicht EP1518 - Technische Daten Technische Daten EP1518-0001 EP1518-0002 Feldbus EtherCAT Feldbusanschluss 2 x M8 Buchse (grün) Anzahl Eingänge 8, davon 2 als 32-Bit-V/R-Zähler nutzbar Anschluss Eingänge [} 27] Nennspannung Eingänge 24 V (-15%/+20%) Eingangsfilter (binäre Eingänge) einstellbar 10 µs…100 ms Eingangsfilter (Zählereingang ) 150 µs... -
Seite 12: Ep1518 - Prozessabbild
Produktübersicht EP1518 - Prozessabbild Das Prozessabbild hängt von der gewählten Betriebsart [} 50] ab. Betriebsart: 2 Zähler und 2 digitale Eingänge (Auslieferungszustand) Unter CNT Input Channel 1 finden Sie die Input-Daten des 1. Zählers. Mit Set counter done wird die Übernahme des Bit Set counter aus dem CNT Output Channel 1 angezeigt. - Seite 13 Produktübersicht Betriebsart: 1 Zähler und 5 digitale Eingänge Unter CNT Input Channel 1 finden Sie die Input-Daten des 1. Zählers. Mit Set counter done wird die Übernahme des Bit Set counter aus dem CNT Output Channel 1 angezeigt. Mit Counter inhibited wird die Übernahme des Bit Inhibit counter aus dem CNT Output Channel 1 angezeigt.
-
Seite 14: Installation
Installation Installation Montage 3.1.1 Abmessungen Abb. 5: Dimensions Alle Maßangaben sind in Millimeter angegeben. Gehäuseeigenschaften EtherCAT Box Schmales Gehäuse Breite Gehäuse Gehäusematerial PA6 (Polyamid) Vergussmasse Polyuhrethan Montage zwei Befestigungslöcher Ø 3 mm für M3 zwei Befestigungslöcher Ø 3 mm für M3 zwei Befestigungslöcher Ø 4,5 mm für M4 Metallteile Messing, vernickelt Kontakte... -
Seite 15: Befestigung
Installation 3.1.2 Befestigung Anschlüsse vor Verschmutzung schützen! Schützen Sie während der Montage der Module alle Anschlüsse vor Verschmutzung! Die Schutzart IP65 ist nur gewährleistet, wenn alle Kabel und Stecker angeschlossen sind! Nicht benutzte An- schlüsse müssen mit den entsprechenden Steckern geschützt werden! Steckersets siehe Katalog. Module mit schmalem Gehäuse werden mit zwei M3-Schrauben montiert. -
Seite 16: Anzugsmomente Für Steckverbinder
Installation 3.1.3 Anzugsmomente für Steckverbinder M8-Steckverbinder Es wird empfohlen die M8-Steckverbinder mit einem Drehmoment von 0,4 Nm festzuziehen. Bei Verwendung des Drehmoment-Schraubendrehers ZB8800 ist auch ein max. Drehmoment von 0,5 Nm zulässig. Abb. 7: EtherCAT Box mit M8-Steckverbindern M12-Steckverbinder Es wird empfohlen die M12-Steckverbinder mit einem Drehmoment von 0,6 Nm festzuziehen. Abb. 8: EtherCAT Box mit M8- und M12-Steckverbindern Version: 2.1.0 EP1518-0002... -
Seite 17: Abb. 9 7/8"-Steckverbinder
Installation 7/8"-Steckverbinder Es wird empfohlen die 7/8"-Steckverbinder mit einem Drehmoment von 1,5 Nm festzuziehen. Abb. 9: 7/8"-Steckverbinder Drehmomentschlüssel Abb. 10: Drehmomentschlüssel ZB8801 Korrektes Drehmoment sicherstellen Verwenden Sie die von Beckhoff lieferbaren Drehmomentschlüssel um die Steckverbinder festzu- ziehen (ZB8800, ZB8801-0000)! EP1518-0002 Version: 2.1.0... -
Seite 18: Anschluss
Installation Anschluss 3.2.1 EtherCAT-Anschluss Für den ankommenden und weiterführenden EtherCAT-Anschluss verfügt • die EtherCAT Box (EPxxxx) über zwei grün gekennzeichnete M8-Buchsen • die Koppler Box (FBB-x110) über zwei M12-Buchsen Abb. 11: EtherCAT Box: M8, 30 mm Gehäuse Abb. 12: EtherCAT Box: M8 60 mm Gehäuse (am Beispiel EP9214) Abb. 13: Koppler Box: M12 Belegung Es gibt verschiedene Standards für die Belegung und Farben bei Steckverbindern und Leitung für Ethernet/... -
Seite 19: Ethercat-Leds
M8-Steckverbindern vorkonfektionierten Leitungen auf die Farben der EN61918 umge- stellt (gelb, orange, weiß, blau). Es sind also verschiedene Farbkodierungen im Umlauf. Die elektri- schen Eigenschaften sind aber absolut identisch! EtherCAT-Steckverbinder Die folgenden Steckverbinder sind für den Einsatz in EtherCAT-Systemen von Beckhoff lieferbar. Bezeichnung Steckverbinder Kommentar ZS1090-0003... - Seite 20 EtherCAT-Modul ist im Status Safe-Operational langsam leuchtet EtherCAT-Modul ist im Status Operational EtherCAT-Stati Die verschiedenen Stati, eines EtherCAT-Moduls sind in der System Basis-Dokumentation zu EtherCAT beschrieben, die auf unserer Homepage (https://www.beckhoff.de/) unter Downloads zur Verfügung steht. Version: 2.1.0 EP1518-0002...
-
Seite 21: Power-Anschluss
Installation 3.2.3 Power-Anschluss Die Einspeisung und Weiterleitung der Versorgungsspannungen erfolgt über zwei M8-Steckverbinder am unteren Ende der Module: • IN: linker M8-Steckverbinder zur Einspeisung der Versorgungsspannungen • OUT: rechter M8-Steckverbinder zur Weiterleitung der Versorgungsspannungen Abb. 15: EtherCAT Box, Anschlüsse für die Versorgungsspannungen Abb. 16: Pinbelegung M8, Power In und Power Out Tab. 1: Kontaktbelegung Kontakt... - Seite 22 Installation Weiterleitung der Versorgungsspannungen Die Power-Anschlüsse IN und OUT sind im Modul gebrückt. Somit können auf einfache Weise die Versorgungsspannungen Us und Up von EtherCAT Box zu EtherCAT Box weitergereicht werden. HINWEIS Maximalen Strom beachten! Beachten Sie auch bei der Weiterleitung der Versorgungsspannungen Us und Up, dass jeweils der für die M8-Steckverbinder maximal zulässige Strom von 4 A nicht überschritten wird! Version: 2.1.0 EP1518-0002...
-
Seite 23: Abb. 17 Ep92X4-0023, Anschlüsse Power In Und Power Out
Benötigt die Maschine größere Ströme oder sind die EtherCAT Box Module weit vom Schaltschrank und der darin befindlichen Spannungsversorgung entfernt installiert, so empfiehlt sich der Einsatz der vierkanaligen Powerverteilungsmodule EP9214 oder EP9224 (mit integriertem Data Logging, siehe www.beckhoff.de/ EP9224). Mit diesen Modulen lassen sich intelligente Powerverteilungskonzepte mit bis zu 2 x 16 A und maximal 2,5 mm²... -
Seite 24: Ep1518 - Status-Leds Für Die Spannungsversorgung
Installation Galvanische Trennung Digitale Module Bei den digitalen Ein-/Ausgabemodulen sind die Massen von Steuerspannung (GNDs) und Peripheriespannung (GNDp) ggfs. miteinander verbunden! Überprüfen Sie dies in der Dokumentation jeder verwendeten EtherCAT Box. Analoge Module Bei den analogen Ein-/Ausgabemodulen sind die Massen von Steuerspannung (GNDs) und Peripheriespannung (GNDp) galvanisch voneinander getrennt, um die galvanische Trennung der Analogsignale von der Steuerspannung zu gewährleisten. -
Seite 25: Power-Kabel
0,50 m ZK2020-3334-0010 1,00 m ZK2020-3334-0020 2,00 m ZK2020-3334-0050 5,00 m Weitere verfügbare Powerkabel und die dazugehörigen Datenblätter finden Sie im Beckhoff Katalog oder auf unseren Internet-Seiten (http://www.beckhoff.de). Technische Daten Daten Bemessungsspannung nach IEC61076-2-101 30 V Verschmutzungsgrad nach IEC 60 664-1 Isolationswiderstand IEC 60 512-2 >10... -
Seite 26: Leitungsverluste M8
Abb. 20: Leitungsverluste auf den Powerkabeln Beispiel 8 m Powerkabel mit 0,34 mm² hat bei 4 A Belastung einen Spannungsabfall von 3,2 V. Powerverteilungs-Module EP92x4-0023 Mit den Powerverteilungs-Modulen EP9214 und EP9224 sind intelligente Spannungsverteilungs- konzepte verfügbar. Weitere Information finden sie unter www.beckhoff.de/EP9224 Version: 2.1.0 EP1518-0002... -
Seite 27: Signalanschluss
Installation 3.2.7 Signalanschluss Digitale Eingänge M8 und M12 Die digitalen Eingangsmodule erfassen die binären Steuersignale aus der Prozessebene und transportieren sie zum übergeordneten Automatisierungsgerät. Der Signalanschluss erfolgt über M8-Steckverbinder (EPxxxx-0001) oder M12-Steckverbinder (EPxxxx-0002). Abb. 21: Signalanschluss - Digitale Eingänge M8 und M12 Die Sensoren werden aus der Steuerspannung Us mit einem gemeinsamen, maximalen Strom von 0,5 A versorgt. -
Seite 28: Status-Leds An Den Signalanschlüssen
Installation 3.2.8 Status-LEDs an den Signalanschlüssen Jeder Kanal zeigt unabhängig von der eingestellten Betriebsart, den Status seines angeschlossenen Sensors durch eine grüne LED neben der Signalbuchse an. Abb. 22: Status-LEDs an den Signalanschlüssen Anschluss Anzeige Bedeutung M12-Buchse Nr. 1 Kanal 0, Kanal 1 Eingang nicht gesetzt grün Eingang gesetzt... -
Seite 29: Ul-Anforderungen
Installation UL-Anforderungen Die Installation der nach UL zertifizierten EtherCAT Box Module muss den folgenden Anforderungen entsprechen. Versorgungsspannung VORSICHT VORSICHT! Die folgenden genannten Anforderungen gelten für die Versorgung aller so gekennzeichneten EtherCAT Box Module. Zur Einhaltung der UL-Anforderungen dürfen die EtherCAT Box Module nur mit einer Spannung von 24 V versorgt werden, die •... -
Seite 30: Atex-Hinweise
Installation ATEX-Hinweise 3.4.1 ATEX - Besondere Bedingungen WARNUNG Beachten Sie die besonderen Bedingungen für die bestimmungsgemäße Verwendung von EtherCAT-Box-Modulen in explosionsgefährdeten Bereichen – Richtlinie 94/9/EG! • Die zertifizierten Komponenten sind mit dem Schutzgehäuse BG2000-0000 [} 31] zu errichten, das einen Schutz gegen mechanische Gefahr gewährleistet! •... -
Seite 31: Bg2000-0000 - Schutzgehäuse Für Ethercat Box
Installation 29 - Produktionswoche 29 10 - Produktionsjahr 2010 02 - Firmware-Stand 02 01 - Hardware-Stand 01 3.4.2 BG2000-0000 - Schutzgehäuse für EtherCAT Box WARNUNG Verletzungsgefahr durch Stromschlag und Beschädigung des Gerätes möglich! Setzen Sie das EtherCAT-System in einen sicheren, spannungslosen Zustand, bevor Sie mit der Montage, Demontage oder Verdrahtung der Module beginnen! ATEX Das Schutzgehäuse BG2000-0000 wird über eine einzelne EtherCAT Box montiert, um die Einhaltung der... -
Seite 32: Atex-Dokumentation
Hinweise zum Einsatz von EtherCAT-Box-Modulen (EPxxxx-xxxx) in explosionsge- fährdeten Bereichen (ATEX) Beachten Sie auch die weiterführende Dokumentation Hinweise zum Einsatz von EtherCAT-Box-Modulen (EPxxxx-xxxx) in explosionsgefährdeten Berei- chen (ATEX) die Ihnen auf der Beckhoff-Homepage http://www.beckhoff.de im Bereich Download zur Verfügung steht! Version: 2.1.0 EP1518-0002... -
Seite 33: Inbetriebnahme Und Konfiguration
Einfügen in das EtherCAT-Netzwerk Installation der neuesten XML-Device-Description Stellen Sie sicher, dass Sie die entsprechende aktuellste XML-Device-Description in TwinCAT in- stalliert haben. Diese kann im Download-Bereich auf der Beckhoff Website heruntergeladen (http:// www.beckhoff.de/german/download/elconfg.htm?id=1983920606140) und entsprechend der Instal- lationsanweisungen installiert werden. -
Seite 34: Abb. 28 Anfügen Eines Neuen E/A-Gerätes (E/A-Geräte -> Rechte Maustaste -> Gerät Anfügen
Inbetriebnahme und Konfiguration Abb. 28: Anfügen eines neuen E/A-Gerätes (E/A-Geräte -> Rechte Maustaste -> Gerät anfügen...) Abb. 29: Auswahl des Gerätes (EtherCAT) • Fügen Sie eine neue Box an. Abb. 30: Anfügen einer neuen Box (Gerät -> Rechte Maustaste -> Box anfügen...) • Im angezeigten Dialog wählen Sie die gewünschte Box (z.B.: EP2816-0008), bestätigen Sie mit OK. Version: 2.1.0 EP1518-0002... -
Seite 35: Abb. 31 Auswahl Einer Box (Z.b.: Ep2816-0008)
Inbetriebnahme und Konfiguration Abb. 31: Auswahl einer Box (z.B.: EP2816-0008) Abb. 32: Angefügte Box im TwinCAT-Baum EP1518-0002 Version: 2.1.0... -
Seite 36: Konfiguration Mit Twincat
Inbetriebnahme und Konfiguration 4.1.2 Konfiguration mit TwinCAT Klicken Sie im linken Fenster des TwinCAT System Managers auf den Baumzweig der EtherCAT Box die Sie konfigurieren möchten (in diesem Beispiel EP2816-0008). Abb. 33: Baumzweig der zu konfigurierende EtherCAT Box Im rechten Fenster des TwinCAT System Managers stehen Ihnen nun verschiedene Karteireiter zur Konfiguration der EtherCAT Box zur Verfügung. -
Seite 37: Abb. 35 Karteireiter Ethercat
Inbetriebnahme und Konfiguration Karteireiter EtherCAT Abb. 35: Karteireiter EtherCAT Typ des EtherCAT-Geräts Product/Revision Produkt- und Revisions-Nummer des EtherCAT-Geräts Auto Inc Adr. Auto-Inkrement-Adresse des EtherCAT-Geräts. Die Auto-Inkrement-Adresse kann benutzt werden, um jedes EtherCAT-Gerät anhand seiner physikalischen Position im Kommunikationsring zu adressieren. Die Auto-Inkrement-Adressierung wird während der Start-Up-Phase benutzt, wenn der EtherCAT-master die Adressen an die EtherCAT-Geräte vergibt. -
Seite 38: Abb. 36 Karteireiter Prozessdaten
Inbetriebnahme und Konfiguration Abb. 36: Karteireiter Prozessdaten Sync-Manager Listet die Konfiguration der Sync-Manager (SM) auf. Wenn das EtherCAT-Gerät eine Mailbox hat, wird der SM0 für den Mailbox-Output (MbxOut) und der SM1 für den Mailbox-Intput (MbxIn) benutzt. Der SM2 wird für die Ausgangsprozessdaten (Outputs) und der SM3 (Inputs) für die Eingangsprozessdaten benutzt. -
Seite 39: Aktivierung Der Pdo-Zuordnung
Inbetriebnahme und Konfiguration Aktivierung der PDO-Zuordnung • der EtherCAT-Slave einmal den Statusübergang PS (von Pre-Operational zu Safe-Operational) durchlaufen (siehe Karteireiter Online [} 43]) • der System Manager die EtherCAT-Slaves neu laden (Schaltfläche PDO-Liste Liste aller von diesem EtherCAT-Gerät unterstützten PDOs. Der Inhalt des ausgewählten PDOs wird der Liste PDO-Content angezeigt. -
Seite 40: Abb. 37 Karteireiter Startup
Inbetriebnahme und Konfiguration Abb. 37: Karteireiter Startup Spalte Beschreibung Transition Übergang, in den der Request gesendet wird. Dies kann entweder • der Übergang von Pre-Operational to Safe-Operational (PS) oder • der Übergang von Safe-Operational to Operational (SO) sein. Wenn der Übergang in "<>" eingeschlossen ist (z.B. <PS>), dann ist der Mailbox Request fest und kann vom Anwender nicht geändert oder gelöscht werden. -
Seite 41: Abb. 38 Karteireiter Coe - Online
Inbetriebnahme und Konfiguration Abb. 38: Karteireiter CoE - Online Darstellung der Objekt-Liste Spalte Beschreibung Index Index und Subindex des Objekts Name Name des Objekts Flags Das Objekt kann ausgelesen und Daten können in das Objekt geschrieben werden (Read/Write) Das Objekt kann ausgelesen werden, es ist aber nicht möglich Daten in das Objekt zu schreiben (Read only) Ein zusätzliches P kennzeichnet das Objekt als Prozessdatenobjekt. -
Seite 42: Abb. 39 Erweiterte Einstellungen
Inbetriebnahme und Konfiguration Update List Die Schaltfläche Update List aktualisiert alle Objekte in der Listenanzeige Auto Update Wenn dieses Kontrollkästchen angewählt ist, wird der Inhalt der Objekte automatisch aktualisiert. Advanced Die Schaltfläche Advanced öffnet den Dialog Advanced Settings. Hier können Sie festlegen, welche Objekte in der Liste angezeigt werden. -
Seite 43: Abb. 40 Karteireiter Online
Inbetriebnahme und Konfiguration Karteireiter Online Abb. 40: Karteireiter Online Status Maschine Init Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Init zu setzen. Pre-Op Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Pre-Operational zu setzen. Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Operational zu setzen. - Seite 44 Inbetriebnahme und Konfiguration File Access over EtherCAT Download Mit dieser Schaltfläche können Sie eine Datei zum EtherCAT-Gerät schreiben. Upload Mit dieser Schaltfläche können Sie eine Datei vom EtherCAT-Gerät lesen. Version: 2.1.0 EP1518-0002...
-
Seite 45: Distributed Clocks (Dc)
4.1.3 Distributed Clocks (DC) EtherCAT-Systemdokumentation Auf der Beckhoff Homepage steht Ihnen im Bereich Download die eine grundlegende Einführung in das Thema EtherCAT und Distributed Clocks zur Verfügung: EtherCAT-Systemdokumentation. Die EtherCAT Box unterstützt die Distributed-Clocks-Funktionalität. Damit die Box den aktuellen Zählerstand rechtzeitig vor Ankunft des abfragenden EtherCAT-Datagrams in den vorgesehenen Prozessdaten bereitstellen kann, muss ein entsprechendes Signal klemmenintern zyklisch generiert werden. -
Seite 46: Beschädigung Der Geräte Möglich
Inbetriebnahme und Konfiguration HINWEIS Beschädigung der Geräte möglich Die hier aufgeführten Hinweise und Erläuterungen sollten mit Bedacht angewendet werden! Die SYNC0- und SYNC1-Einstellungen werden vom EtherCAT-Master automatisch mit Werten belegt, die eine zuverlässige und aktuelle Prozessdatenerfassung unterstützen. Anwenderseitige Eingriffe an dieser Stelle können zu unerwünschtem Verhalten führen! Bei der Manipulation dieser Einstellungen im System Manager wird softwareseitig keine Plausibilitätskon- trolle durchgeführt! Eine korrekte Funktion der Klemme in allen denkbaren Einstellungsvarianten kann nicht gewährleistet werden! -
Seite 47: Distributed Clocks Und Ep1518
Inbetriebnahme und Konfiguration Anwenderdefiniert Beliebige Zahl bis 2 ns ≈ 4,3 sek. Kommawerte sind möglich. Shift Time MIt der Shift Time kann der SYNC0-Puls dieser EtherCAT Box gegenüber anderen Boxen/Klemmen bzw. dem globalen SYNC-Puls in ns-Schritten verschoben werden. Sollen die Eingänge mehrerer Boxen gleichzeitig gelesen werden, muss hier derselbe Wert eingetragen werden. -
Seite 48: Konfiguration Der Ep1518
Inbetriebnahme und Konfiguration Konfiguration der EP1518 4.2.1 Grundlagen zur Funktion Die EtherCAT Box EP1518 besitzt 8 digitale Eingänge. Davon können die Eingänge 0, 1 und 2 sowie 4, 5 und 6 jeweils für einen Zähler genutzt werden. Die Stati der einzelnen Eingänge werden unabhängig von deren Verwendung immer im Prozessabbild dargestellt. -
Seite 49: Abb. 44 Zählbetrieb Mit Standardeinstellung
Inbetriebnahme und Konfiguration Abb. 44: Zählbetrieb mit Standardeinstellung Zählbetrieb mit Umstellung der Zählrichtung (Rückwärtszähler) Durch einen High-Pegel am Up/Down Eingang oder durch Setzen des CoE-Objektes 0x80x0:04 Count down wird die Zählrichtung geändert. Die Zählrichtung ist rückwärts. Abb. 45: Zählbetrieb mit Umstellung der Zählrichtung Zählbetrieb mit invertiertem (negierten) GATE-Eingang In der Default-Einstellung wird der Zähler durch einen High-Pegel am GATE-Eingang oder durch Setzen des Bits Inhibit Counters gesperrt... -
Seite 50: Betriebsarten
Inbetriebnahme und Konfiguration Abb. 46: Zählbetrieb mit invertiertem GATE-Eingang Abb. 47: CoE zum invertieren des GATE-Eingangs 4.2.2 Betriebsarten Betriebsartenwahl Die EP1518 lässt sich in 3 Betriebsarten betreiben: • Zwei Vorwärts/Rückwärtszähler [} 51] (Auslieferungszustand) • Ein Vorwärts/Rückwärtszähler [} 52] • 8 digitale Eingänge [} 53] Die Einstellung erfolgt über Auswahl der PDOs im Sync-Manager [} 38]: Betriebsart Anzahl Anzahl "freie"... -
Seite 51: Der Zweite Zähler Ist Intern Immer Aktiv
Inbetriebnahme und Konfiguration Betriebsarteinstel- 0x1600 0x1601 0x1A00 0x1A01 0x1A02 0x1A03 Bemerkungen lungen der PDOs 2 Vorwärts/ 2 Zähler, digitale Eingänge, Rückwärtszähler Diagnose der Us (32 Bit) 1 Vorwärts/ Rückwärtszähler (32 Bit) 8 digitale Eingänge, digitale Eingänge: kein Zähler Filter für Eingang 0 und 4 fest auf 150 µs eingestellt. - Seite 52 Inbetriebnahme und Konfiguration Abb. 49: Einstellung der PDOs 0x1A00 bis 0x1A03, Defaulteinstellungen der Objekte 0x8000 bis 0x8002:0 Die PDOs 0x1600 [} 63], 0x1601 [} 64] sowie 0x1A00 [} 64], 0x1A01 [} 64], 0x1A02 [} 65] und 0x1A03 [} 65] sind aktiviert. Die Bedeutung der einzelnen Objekte ist in der Objektbeschreibung erläutert. Ein Vorwärts/Rückwärtszähler (0x1601 deaktiviert, 0x1A01 deaktiviert) Dieser Modus kann folgendermaßen eingestellt werden: Version: 2.1.0...
- Seite 53 Inbetriebnahme und Konfiguration Abb. 50: Einstellung der PDOs 0x1600 Abb. 51: Einstellung der PDOs 0x1A00, 0x1A02 und 0x1A03 Die PDOs 0x1600 [} 63] sowie 0x1A00 [} 64], 0x1A02 [} 65] und 0x1A03 [} 65] sind aktiviert. Die CoE- Objekte sind identisch zur Betriebsart 2 x 32 Bit-Zähler. 8 digitale Eingänge, kein Zähler Dieser Modus kann folgendermaßen eingestellt werden: EP1518-0002...
-
Seite 54: Einstellungen Der Zähler
Inbetriebnahme und Konfiguration Abb. 52: Einstellung der PDOs 0x1A02 und 0x1A03 Die PDOs 0x1A02 [} 65] und 0x1A03 [} 65] sind aktiviert. Die Bedeutung der einzelnen Objekte ist in der Objektbeschreibung erläutert. 4.2.3 Einstellungen der Zähler "Freischalten" der GATE- und Up/Down Eingänge als Standard-Eingänge Durch Setzen der CoE-Objekte Enable Input gate und Enable input UD werden die Eingänge nicht mehr den Zählern zugeordnet sondern als Standard-Eingänge verwendet. - Seite 55 Inbetriebnahme und Konfiguration Abb. 54: Setzen des Zählers Automatisches Setzen/Rücksetzen des Zählers auf einen definierten Wert Durch Vorgabe eines beliebigen Wertes in Counter reload value und Aktivieren des Bits Enable reload wird der Zähler bei Über- oder Unterschreiten (je nach Zählrichtung) des vorgegebenen Werts auf 0 bzw. den eingestellten Wert gesetzt.
-
Seite 56: Wiederherstellen Des Auslieferungszustandes
Inbetriebnahme und Konfiguration 4.2.4 Wiederherstellen des Auslieferungszustandes Um den Auslieferungszustand der Backup-Objekte bei den ELxxxx-Klemmen / EPxxxx-Boxen wiederherzustellen, kann im TwinCAT System Manger (Config-Modus) das CoE-Objekt Restore default parameters, Subindex 001 angewählt werden). Abb. 56: Auswahl des PDO Restore default parameters Durch Doppelklick auf SubIndex 001 gelangen Sie in den Set Value -Dialog. -
Seite 57: Coe Objekte
Objektübersicht EtherCAT XML Device Description Die Darstellung entspricht der Anzeige der CoE-Objekte aus der EtherCAT XML Device Description. Es wird empfohlen, die entsprechende aktuellste XML-Datei im Download-Bereich auf der Beckhoff Website herunterzuladen und entsprechend der Installationsanweisungen zu installieren. Index (hex) - Seite 58 Inbetriebnahme und Konfiguration Index (hex) Name Flags Default Wert Subindex CNT TxPDO-Map InputsCh.2 0x0A (10 1A01:0 1A01:01 SubIndex 001 0x0000:00, 2 [} 64] 1A01:02 SubIndex 002 0x6010:03, 1 1A01:03 SubIndex 003 0x6010:04, 1 1A01:04 SubIndex 004 0x6010:05, 1 1A01:05 SubIndex 005 0x6010:06, 1 1A01:06 SubIndex 006...
- Seite 59 Inbetriebnahme und Konfiguration Index (hex) Name Flags Default Wert Subindex SM output parameter 0x20 (32 1C32:0 1C32:01 Sync mode 0x0001 (1 [} 66] 1C32:02 Cycle time 0x000F4240 (1000000 1C32:03 Shift time 0x00000000 (0 1C32:04 Sync modes supported 0xC007 (49159 1C32:05 Minimum cycle time 0x0003D090 (250000 1C32:06 Calc and copy time...
- Seite 60 Inbetriebnahme und Konfiguration Index (hex) Name Flags Default Wert Subindex DIG Inputs 0x08 (8 6020:0 6020:01 Input 0 0x00 (0 [} 68] 6020:02 Input 1 0x00 (0 6020:03 Input 2 0x00 (0 6020:04 Input 3 0x00 (0 6020:05 Input 4 0x00 (0 6020:06 Input 5 0x00 (0...
-
Seite 61: Objektbeschreibung Und Parametrierung
EtherCAT XML Device Description Die Darstellung entspricht der Anzeige der CoE-Objekte aus der EtherCAT XML Device Descripti- on. Es wird empfohlen, die entsprechende aktuellste XML-Datei im Download-Bereich auf der Beck- hoff Website herunterzuladen (http://www.beckhoff.de/german/default.htm?download/elconfg.htm) und entsprechend der Installationsanweisungen zu installieren. Einführung In der CoE-Übersicht sind Objekte mit verschiedenem Einsatzzweck enthalten:... - Seite 62 Inbetriebnahme und Konfiguration Index 8000 CNT Settings Index (hex) Name Bedeutung Datentyp Flags Default 8000:0 CNT Settings Maximaler Subindex UINT8 0x13 (19 8000:03 Enable reload BOOLEAN 0x00 (0 Der Zähler zählt bis zum Wert in Index 0x8000:13 [} 62] 8000:04 Count down Zählrichtung: BOOLEAN 0x00 (0...
- Seite 63 Inbetriebnahme und Konfiguration 4.3.2.2 Standardobjekte (0x1000-0x1FFF) Die Standardobjekte haben für alle EtherCAT-Slaves die gleiche Bedeutung. Index 1000 Device type Index (hex) Name Bedeutung Datentyp Flags Default 1000:0 Device type Geräte-Typ des EtherCAT-Slaves: Das Lo-Word enthält UINT32 0x00001389 das verwendete CoE Profil (5001). Das Hi-Word enthält (5001 das Modul Profil entsprechend des Modular Device Profi- Index 1008 Device name...
- Seite 64 Inbetriebnahme und Konfiguration Index 1601 CNT RxPDO-Map OutputsCh.2 Index (hex) Name Bedeutung Datentyp Flags Default 1601:0 CNT RxPDO-Map PDO Mapping RxPDO 2 UINT8 0x05 (5 OutputsCh.2 1601:01 SubIndex 001 1. PDO Mapping entry (object 0x7020 (CNT Outputs), UINT32 0x0000:00, 2 entry 0x01 (Enable output functions)) 1601:02 SubIndex 002...
- Seite 65 Inbetriebnahme und Konfiguration Index 1A02 DIG TxPDO-Map Inputs Index (hex) Name Bedeutung Datentyp Flags Default 1A02:0 DIG TxPDO-Map In- PDO Mapping TxPDO 3 UINT8 0x09 (9 puts 1A02:01 SubIndex 001 1. PDO Mapping entry (2 bits align) UINT32 0x6020:01, 1 1A02:02 SubIndex 002 2.
- Seite 66 Inbetriebnahme und Konfiguration Index 1C13 TxPDO assign Index (hex) Name Bedeutung Datentyp Flags Default 1C13:0 TxPDO assign PDO Assign Inputs UINT8 0x04 (4 1C13:01 Subindex 001 1. zugeordnete TxPDO (enthält den Index des zugehöri- UINT16 0x1A00 gen TxPDO Mapping Objekts) (6656 1C13:02 Subindex 002...
- Seite 67 Inbetriebnahme und Konfiguration Index 1C33 SM input parameter Index (hex) Name Bedeutung Datentyp Flags Default 1C33:0 SM input parameter Synchronisierungsparameter der Inputs UINT8 0x20 (32 1C33:01 Sync mode Aktuelle Synchronisierungsbetriebsart: UINT16 0x0022 (34 • 0: Free Run • 1: Synchron with SM 3 Event (keine Outputs vorhanden) •...
-
Seite 68: Profilspezifische Objekte (0X6000-0Xffff)
Inbetriebnahme und Konfiguration 4.3.2.3 Profilspezifische Objekte (0x6000-0xFFFF) Die profilspezifischen Objekte haben für alle EtherCAT Slaves, die das Profil 5001 unterstützen, die gleiche Bedeutung. Index 6000 CNT Inputs Index (hex) Name Bedeutung Datentyp Flags Default 6000:0 CNT Inputs Maximaler Subindex UINT8 0x11 (17 6000:03 Set counter done... - Seite 69 Inbetriebnahme und Konfiguration Index 7010 CNT Outputs Index (hex) Name Bedeutung Datentyp Flags Default 7010:0 CNT Outputs Maximaler Subindex UINT8 0x11 (17 7010:03 Set counter Zählerstand setzen BOOLEAN 0x00 (0 7010:04 Inhibit counter Der Zähler wird gestoppt, solange dieses Bit aktiv ist. Der BOOLEAN 0x00 (0 alte Zählerstand bleibt erhalten...
-
Seite 70: Anhang
Anhang Anhang Allgemeine Betriebsbedingungen Schutzarten nach IP-Code In der Norm IEC 60529 (DIN EN 60529) sind die Schutzgrade festgelegt und nach verschiedenen Klassen eingeteilt. Die Bezeichnung erfolgt in nachstehender Weise. 1. Ziffer: Staub- und Be- Bedeutung rührungsschutz Nicht geschützt Geschützt gegen den Zugang zu gefährlichen Teilen mit dem Handrücken. Geschützt gegen feste Fremd- körper Ø 50 mm Geschützt gegen den Zugang zu gefährlichen Teilen mit einem Finger. -
Seite 71: Ethercat Box- / Ethercat-P-Box - Zubehör
Wechselklinge für M8/SW9 für Drehmoment-Schraubwerkzeug ZB8801-0000 ZB8801-0002 Wechselklinge für M12/SW13 für Drehmoment-Schraubwerkzeug ZB8801-0000 ZB8801-0003 Wechselklinge für M12 feldkonfektionierbar/SW18 für Drehmoment- Schraubwerkzeug ZB8801-0000 Weiteres Zubehör Weiteres Zubehör finden Sie in der Preisliste für Feldbuskomponenten von Beckhoff und im Internet unter https://www.beckhoff.de EP1518-0002 Version: 2.1.0... -
Seite 72: Support Und Service
Anhang Support und Service Beckhoff und seine weltweiten Partnerfirmen bieten einen umfassenden Support und Service, der eine schnelle und kompetente Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zur Verfügung stellt. Beckhoff Support Der Support bietet Ihnen einen umfangreichen technischen Support, der Sie nicht nur bei dem Einsatz einzelner Beckhoff Produkte, sondern auch bei weiteren umfassenden Dienstleistungen unterstützt:... - Seite 73 EtherCAT-Box-Module in einem EtherCAT-Netzwerk ..............Abb. 2 EtherCAT Box mit M8-Anschlüssen für Sensor/Aktoren ............. Abb. 3 EtherCAT Box mit M12-Anschlüssen für Sensor/Aktoren ............Abb. 4 EP1518-0001 und EP1518-0002....................Abb. 5 Dimensions ..........................Abb. 6 Montageschiene ZS5300-0001....................Abb. 7 EtherCAT Box mit M8-Steckverbindern..................
- Seite 74 Abbildungsverzeichnis Abb. 45 Zählbetrieb mit Umstellung der Zählrichtung ................Abb. 46 Zählbetrieb mit invertiertem GATE-Eingang ................Abb. 47 CoE zum invertieren des GATE-Eingangs .................. Abb. 48 Einstellung der PDOs 0x1600 und 0x1601, Defaulteinstellungen der Objekte 0x8000 bis 0x8022:0 ............................Abb. 49 Einstellung der PDOs 0x1A00 bis 0x1A03, Defaulteinstellungen der Objekte 0x8000 bis 0x8002:0 ............................