
Verwandte Anleitungen für Beckhoff EL7411















Inhaltszusammenfassung für Beckhoff EL7411
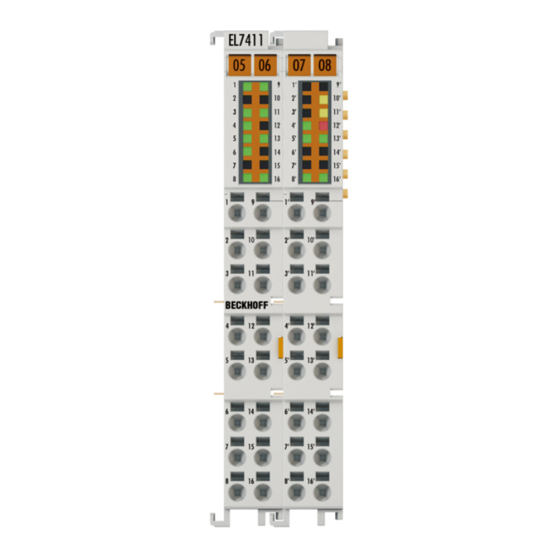
- Seite 1 Dokumentation | DE EL7411 BLDC-Motor-Klemme mit Inkremental-Encoder 14.03.2022 | Version: 1.2...
-
Seite 3: Inhaltsverzeichnis
Versionsidentifikation von EtherCAT-Geräten ................. 10 1.4.1 Allgemeine Hinweise zur Kennzeichnung................ 10 1.4.2 Versionsidentifikation von EL Klemmen ................ 11 1.4.3 Beckhoff Identification Code (BIC)................... 12 1.4.4 Elektronischer Zugriff auf den BIC (eBIC) ............... 14 2 Produktübersicht ............................. 16 Einführung ............................ 16 Technische Daten.......................... 17 Technologie ............................. 19 3 Grundlagen der Kommunikation...................... 20... - Seite 4 Unterschiede zu Tc2_Mc2 ..................... 151 6.7.7 Starttypen ........................ 151 6.7.8 Fehlermeldungen...................... 152 Touch Probe .......................... 153 Prozessdaten.......................... 157 7 Fehlerdiagnose ............................ 164 Diag History ........................... 164 8 CoE-Parameter............................ 166 Restore-Objekt .......................... 166 Konfigurationsdaten........................ 166 Konfigurationsdaten herstellerspezifisch .................. 178 Kommando-Objekt......................... 178 Eingangsdaten.......................... 179 Ausgangsdaten.......................... 185 Informationsdaten, Diagnosedaten.................... 189 Standardobjekte .......................... 191 9 Anhang .............................. 216 Version: 1.2 EL7411...
- Seite 5 Firmware Update EL/ES/ELM/EM/EPxxxx .................. 216 9.3.1 Gerätebeschreibung ESI-File/XML ................ 218 9.3.2 Erläuterungen zur Firmware .................. 221 9.3.3 Update Controller-Firmware *.efw ................. 221 9.3.4 FPGA-Firmware *.rbf ..................... 223 9.3.5 Gleichzeitiges Update mehrerer EtherCAT-Geräte ............ 227 Wiederherstellen des Auslieferungszustandes................ 228 Support und Service ........................ 229 EL7411 Version: 1.2...
- Seite 6 Inhaltsverzeichnis Version: 1.2 EL7411...
-
Seite 7: Vorwort
, XFC , XTS und XPlanar sind eingetragene und lizenzierte Marken der Beckhoff Automation GmbH. Die Verwendung anderer in dieser Dokumentation enthaltenen Marken oder Kennzeichen durch Dritte kann zu einer Verletzung von Rechten der Inhaber der entsprechenden Bezeichnungen führen. Patente Die EtherCAT-Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen und... -
Seite 8: Sicherheitshinweise
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software- Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der Beckhoff Automation GmbH & Co. KG. Qualifikation des Personals Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-, Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist. -
Seite 9: Ausgabestände Der Dokumentation
• Neue Kapitel: ◦ Homing / Referenzfahrt [} 131] ◦ Touch Probe [} 153] ◦ Inbetriebnahme mit Status-Wort und Control-Wort [} 139] ◦ Inbetriebnahme mit Drive Motion Control [} 142] ◦ Prozessdaten [} 157] • Struktur-Update • Erste Veröffentlichung. • Erste vorläufige Version. EL7411 Version: 1.2... -
Seite 10: Versionsidentifikation Von Ethercat-Geräten
Dokumentation angegeben. Jeder Revision zugehörig und gleichbedeutend ist üblicherweise eine Beschreibung (ESI, EtherCAT Slave Information) in Form einer XML-Datei, die zum Download auf der Beckhoff Webseite bereitsteht. Die Revision wird seit 2014/01 außen auf den IP20-Klemmen aufgebracht, siehe Abb. „EL5021 EL- Klemme, Standard IP20-IO-Gerät mit Chargennummer und Revisionskennzeichnung (seit 2014/01)“. -
Seite 11: Versionsidentifikation Von El Klemmen
1.4.2 Versionsidentifikation von EL Klemmen Als Seriennummer/Date Code bezeichnet Beckhoff im IO-Bereich im Allgemeinen die 8-stellige Nummer, die auf dem Gerät aufgedruckt oder auf einem Aufkleber angebracht ist. Diese Seriennummer gibt den Bauzustand im Auslieferungszustand an und kennzeichnet somit eine ganze Produktions-Charge, unterscheidet aber nicht die Module einer Charge. -
Seite 12: Beckhoff Identification Code (Bic)
Vorwort 1.4.3 Beckhoff Identification Code (BIC) Der Beckhoff Identification Code (BIC) wird vermehrt auf Beckhoff-Produkten zur eindeutigen Identitätsbestimmung des Produkts aufgebracht. Der BIC ist als Data Matrix Code (DMC, Code-Schema ECC200) dargestellt, der Inhalt orientiert sich am ANSI-Standard MH10.8.2-2016. Abb. 2: BIC als Data Matrix Code (DMC, Code-Schema ECC200) Die Einführung des BIC erfolgt schrittweise über alle Produktgruppen hinweg. - Seite 13 Entsprechend als DMC: Abb. 3: Beispiel-DMC 1P072222SBTNk4p562d71KEL1809 Q1 51S678294 Ein wichtiger Bestandteil des BICs ist die Beckhoff Traceability Number (BTN, Pos.-Nr. 2). Die BTN ist eine eindeutige, aus acht Zeichen bestehende Seriennummer, die langfristig alle anderen Seriennummern- Systeme bei Beckhoff ersetzen wird (z. B. Chargenbezeichungen auf IO-Komponenten, bisheriger Seriennummernkreis für Safety-Produkte, etc.).
-
Seite 14: Elektronischer Zugriff Auf Den Bic (Ebic)
ESI/XML-Konfigurationsdatei für den EtherCAT‑Master bekannt. Zu den Zusammenhängen siehe die entsprechenden Kapitel im EtherCAT‑Systemhandbuch (Link). In das ESI‑EEPROM wird auch die eBIC gespeichert. Die Einführung des eBIC in die Beckhoff IO Produktion (Klemmen, Boxen) erfolgt ab 2020; mit einer weitgehenden Umsetzung ist in 2021 zu rechnen. - Seite 15 ◦ Besteht das Gerät aus mehreren Sub-Geräten mit eigener Identität, aber nur das TopLevel‑Gerät ist über EtherCAT zugänglich, steht im CoE‑Objekt‑Verzeichnis 0x10E2:01 die eBIC des TopLevel-Geräts, in 0x10E2:nn folgen die eBIC der Sub‑Geräte. Profibus/Profinet/DeviceNet… Geräte Für diese Geräte ist derzeit keine elektronische Speicherung und Auslesung geplant. EL7411 Version: 1.2...
-
Seite 16: Produktübersicht
EL7411 | BLDC-Motor-Klemme mit Inkremental-Encoder, 48 V , 4,5 A (I Die BLDC-Motor-Klemme EL7411 bietet eine hohe Regelungs-Performance in sehr kompakter Bauform für den mittleren Leistungsbereich von BLDC-Motoren. Durch die schnelle Regelungstechnik und den Anschluss eines Inkremental-Encoders können sowohl sehr hohe Geschwindigkeitsprofile als auch dynamische Positionieraufgaben realisiert werden. -
Seite 17: Technische Daten
8,0 A bis 45 °C Umgebungstemperatur Spitzenstrom (eff.) max. 9,0 A für 1 s Spitzenstrom (eff.) mit Lüftermodul ZB8610 max. 16,0 A für 1 s bis 55 °C Umgebungstemperatur Drehfeldfrequenz 0…599 Hz PWM-Taktfrequenz 16 kHz Stromreglerfrequenz 32 kHz Ausgang für die Motorbremse Ausgangsspannung 24 V Ausgangsstrom max. 0,5 A EL7411 Version: 1.2... - Seite 18 HD (High Density)-Gehäuse mit Signal-LEDs Gewicht ca. 95 g Einbaulage Beliebig. Empfohlen: Standard-Einbaulage [} 41] Material Polycarbonat Abmessungen (B x H x T) 24 mm x 100 mm x 68 mm Montage Auf 35-mm-Tragschiene entsprechend EN 60715. Mit Verriegelung. Zulassungen und Konformität Zulassungen CE, EAC, UKCA, UL [} 52] Version: 1.2 EL7411...
-
Seite 19: Technologie
Inkrementalencoder kommutiert und betrieben. Aufgrund der aufgeführten Punkte sind BLDC- Motoren in den meisten Fällen kostengünstiger als Servomotoren. Der BLDC-Motor und die Verstärkerendstufe EL7411 zusammen bilden den Antrieb. Der BLDC-Motor wird in einem geschlossenen Regelkreis positions-, geschwindigkeits- oder momentgeregelt betrieben. -
Seite 20: Grundlagen Der Kommunikation
- Kabelsätze ZK1090-9191-xxxx bzw. - feldkonfektionierbare RJ45 Stecker ZS1090-0005 - feldkonfektionierbare Ethernet Leitung ZB9010, ZB9020 Geeignete Kabel zur Verbindung von EtherCAT-Geräten finden Sie auf der Beckhoff Website! E-Bus-Versorgung Ein Buskoppler kann die an ihm angefügten EL-Klemmen mit der E-Bus-Systemspannung von 5 V versorgen, in der Regel ist ein Koppler dabei bis zu 2 A belastbar (siehe Dokumentation des jeweiligen... -
Seite 21: Allgemeine Hinweise Zur Watchdog-Einstellung
Slave. Mit dem PDI-Watchdog kann diese Kommunikation auf Ausfall überwacht werden. Der PDI-Watchdog ist also eine Überwachung auf korrekte und rechtzeitige Prozessdatenkommunikation mit dem ESC, aber von der Applikations-Seite aus betrachtet. Die Einstellungen für SM- und PDI-Watchdog sind im TwinCAT System Manager für jeden Slave gesondert vorzunehmen: EL7411 Version: 1.2... - Seite 22 Die Checkbox erlaubt eine manuelle Einstellung der Watchdog-Zeiten. Sind die Ausgänge gesetzt und tritt eine EtherCAT-Kommunikationsunterbrechung auf, löst der SM-Watchdog nach der eingestellten Zeit ein Löschen der Ausgänge aus. Diese Einstellung kann dazu verwendet werden, um eine Klemme an langsame Version: 1.2 EL7411...
-
Seite 23: Ethercat State Machine
Hochlaufs des Slaves müssen in jedem State spezifische Kommandos vom EtherCAT Master zum Gerät gesendet werden. Es werden folgende Zustände unterschieden: • Init • Pre-Operational • Safe-Operational und • Operational • Boot Regulärer Zustand eines jeden EtherCAT Slaves nach dem Hochlauf ist der Status OP. EL7411 Version: 1.2... -
Seite 24: Ausgänge Im Safeop
Einstellungen im SAFEOP und OP in einen sicheren Zustand - je nach Gerät und Einstellung z. B. auf AUS. Wird dies durch Deaktivieren der Watchdogüberwachung im Modul unterbunden, können auch im Geräte-Zustand SAFEOP Ausgänge geschaltet werden bzw. gesetzt bleiben. Version: 1.2 EL7411... -
Seite 25: Coe-Interface
Parametern in 0x4000 ausgerüstet wurden und auf 0x8000 umgestellt wurden, unterstützen aus Kompatibilitätsgründen beide Bereiche und spiegeln intern. • 0x6000: hier liegen die Eingangs-PDO („Eingang“ aus Sicht des EtherCAT-Masters) • 0x7000: hier liegen die Ausgangs-PDO („Ausgang“ aus Sicht des EtherCAT-Masters) EL7411 Version: 1.2... -
Seite 26: Verfügbarkeit
Indizes und geben sie einen entsprechenden Wert im „SetValue“-Dialog ein. • aus der Steuerung/PLC über ADS z. B. durch die Bausteine aus der TcEtherCAT.lib Bibliothek Dies wird für Änderungen während der Anlangenlaufzeit empfohlen oder wenn kein System Manager bzw. Bedienpersonal zur Verfügung steht. Version: 1.2 EL7411... -
Seite 27: Datenerhaltung
Grundlagen der Kommunikation Datenerhaltung Werden online auf dem Slave CoE-Parameter geändert, wird dies in Beckhoff-Geräten üblicherwei- se ausfallsicher im Gerät (EEPROM) gespeichert. D. h. nach einem Neustart (Repower) sind die veränderten CoE-Parameter immer noch erhalten. Andere Hersteller können dies anders handhaben. - Seite 28 ◦ wird das reale aktuelle Verzeichnis des Slaves ausgelesen. Dies kann je nach Größe und Zykluszeit einige Sekunden dauern. ◦ wird die tatsächliche Identität angezeigt ◦ wird der Firmware- und Hardware-Stand des Gerätes laut elektronischer Auskunft angezeigt ◦ ist ein grünes Online zu sehen Version: 1.2 EL7411...
- Seite 29 • Kanal 0: Parameterbereich 0x8000:00 ... 0x800F:255 • Kanal 1: Parameterbereich 0x8010:00 ... 0x801F:255 • Kanal 2: Parameterbereich 0x8020:00 ... 0x802F:255 • ... Allgemein wird dies geschrieben als 0x80n0. Ausführliche Hinweise zum CoE-Interface finden Sie in der EtherCAT-Systemdokumentation auf der Beckhoff Website. EL7411 Version: 1.2...
-
Seite 30: Distributed Clock
Umfang von 32 Bit, d. h. nach ca. 4,2 Sekunden läuft die Variable über • Diese lokale Uhr wird vom EtherCAT Master automatisch mit der Master Clock im EtherCAT Bus mit einer Genauigkeit < 100 ns synchronisiert. Detaillierte Informationen entnehmen Sie bitte der vollständigen EtherCAT-Systembeschreibung. Version: 1.2 EL7411... -
Seite 31: Installation
• Beim Umgang mit den Komponenten ist auf gute Erdung der Umgebung zu achten (Arbeitsplatz, Verpa- ckung und Personen) • Jede Busstation muss auf der rechten Seite mit der Endkappe EL9011 oder EL9012 abgeschlossen wer- den, um Schutzart und ESD-Schutz sicher zu stellen. Abb. 11: Federkontakte der Beckhoff I/O-Komponenten EL7411 Version: 1.2... -
Seite 32: Tragschienenmontage
Achten Sie bei der Montage der Komponenten darauf, dass der Verriegelungsmechanismus nicht in Konflikt mit den Befestigungsschrauben der Tragschiene gerät. Verwenden Sie zur Befesti- gung von Tragschienen mit einer Höhe von 7,5 mm unter den Klemmen und Kopplern flache Mon- tageverbindungen wie Senkkopfschrauben oder Blindnieten. Version: 1.2 EL7411... - Seite 33 EL91xx, EL92xx) unterbrechen die Powerkontakte und stellen so den Anfang einer neuen Ver- sorgungsschiene dar. PE-Powerkontakt Der Powerkontakt mit der Bezeichnung PE kann als Schutzerde eingesetzt werden. Der Kontakt ist aus Sicherheitsgründen beim Zusammenstecken voreilend und kann Kurzschlussströme bis 125 A ableiten. EL7411 Version: 1.2...
-
Seite 34: Beschädigung Des Gerätes Möglich
Klemmen Sie zur Isolationsprüfung die PE- Zuleitung am Buskoppler bzw. der Einspeiseklemme ab! Um weitere Einspeisestellen für die Prüfung zu entkoppeln, können Sie diese Einspeiseklemmen entriegeln und mindestens 10 mm aus dem Verbund der übrigen Klemmen herausziehen. WARNUNG Verletzungsgefahr durch Stromschlag! Der PE-Powerkontakt darf nicht für andere Potentiale verwendet werden! Version: 1.2 EL7411... -
Seite 35: Montagevorschriften Für Erhöhte Mechanische Belastbarkeit
• Die Befestigungspunkte der Tragschiene sind in einem Abstand vom 5 cm zu setzen • Zur Befestigung der Tragschiene sind Senkkopfschrauben zu verwenden • Die freie Leiterlänge zwischen Zugentlastung und Leiteranschluss ist möglichst kurz zu halten; der Abstand zum Kabelkanal ist mit ca.10 cm zu einhalten EL7411 Version: 1.2... -
Seite 36: Anschlusstechnik
Dadurch verringert sich die Montagezeit und ein Verwechseln der Anschlussdrähte ist ausgeschlossen. Die gewohnten Maße der Klemme ändern sich durch den Stecker nur geringfügig. Der Stecker trägt ungefähr 3 mm auf; dabei bleibt die maximale Höhe der Klemme unverändert. Version: 1.2 EL7411... -
Seite 37: Verdrahtung Hd-Klemmen
Die High-Density-Klemmen der Serien ELx8xx und KLx8xx unterstützen keine stehende Verdrah- tung. Ultraschall-litzenverdichtete Leiter Ultraschall-litzenverdichtete Leiter An die Standard- und High-Density-Klemmen (HD-Klemmen) können auch ultraschall-litzenverdich- tete (ultraschallverschweißte) Leiter angeschlossen werden. Beachten Sie die unten stehenden Ta- bellen zum Leitungsquerschnitt [} 38]! EL7411 Version: 1.2... - Seite 38 Bei den HD-Klemmen erfolgt der Leiteranschluss bei massiven Leitern werkzeuglos, in Direktstecktechnik, d. h. der Leiter wird nach dem Abisolieren einfach in die Klemmstelle gesteckt. Das Lösen der Leitungen erfolgt, wie bei den Standardklemmen, über die Kontakt-Entriegelung mit Hilfe eines Schraubendrehers. Den zulässigen Leiterquerschnitt entnehmen Sie der nachfolgenden Tabelle. Version: 1.2 EL7411...
- Seite 39 0,25 ... 1,5 mm Leitungsquerschnitt (Aderleitung mit Aderendhülse) 0,14 ... 0,75 mm Leitungsquerschnitt (ultraschall-litzenverdichtet) nur 1,5 mm (siehe Hinweis [} 37]!) Abisolierlänge 8 ... 9 mm Schirmung Schirmung Analoge Sensoren und Aktoren sollten immer mit geschirmten, paarig verdrillten Leitungen ange- schlossen werden. EL7411 Version: 1.2...
-
Seite 40: Positionierung Von Passiven Klemmen
Stromaufnahme aus dem E-Bus. Um einen optimalen Datenaustausch zu gewährleisten, dürfen nicht mehr als zwei passive Klemmen direkt aneinander gereiht werden! Beispiele für die Positionierung von passiven Klemmen (hell eingefärbt) Abb. 19: Korrekte Positionierung Abb. 20: Inkorrekte Positionierung Version: 1.2 EL7411... -
Seite 41: Einbaulagen Bei Betrieb Mit Und Ohne Lüfter
Für die Standard-Einbaulage beim Betrieb mit Lüfter wird die Tragschiene waagerecht montiert und die Anschlussflächen der EL/KL-Klemmen weisen nach vorne (siehe Abb. „Empfohlene Abstände bei Betrieb mit Lüfter“). Die Klemmen werden dabei unterstützend vom z. B. ZB8610 Lüftermodul von unten nach oben durchlüftet. EL7411 Version: 1.2... - Seite 42 Durch die verstärkende Wirkung auf die Kühlung der Klemmen durch den Lüfter sind ggf. weitere Einbaulagen zulässig (siehe Abb. „Weitere Einbaulagen, Beispiel 1 und 2“); entnehmen Sie entsprechende Hinweise bitte den Technischen Daten der Klemme. Abb. 23: Weitere Einbaulagen, Beispiel 1 Version: 1.2 EL7411...
- Seite 43 Installation Abb. 24: Weitere Einbaulagen, Beispiel 2 EL7411 Version: 1.2...
-
Seite 44: Schirmkonzept
Installation Schirmkonzept Die vorkonfektionierten Leitungen von Beckhoff Automation bieten zusammen mit der Schirmschiene einen optimalen Schutz gegen elektromagnetische Störungen. Es wird empfohlen, den Schirm möglichst nah an der Klemme aufzulegen, um Störungen auf ein Minimum zu reduzieren. Anschluss der Motorleitung an die Schirmschiene Befestigen Sie die Schirmschienenträger 1 auf der Hutschiene 2. - Seite 45 Motorleitung 5 mit der Schirmschelle 7 an die Schirmschiene 3 bzw. Schirmschienen-Bügel 3a. Ziehen Sie die Schraube 8 bis zum Anschlag an. Befestigen Sie die PE-Schelle 9 an die Schirmschiene 3 bzw. Schirmschienen-Bügel 3a. Klemmen Sie die PE-Ader 10 der Motorleitung 5 unter die PE-Schelle 9. Abb. 27: Schirmanbindung EL7411 Version: 1.2...
- Seite 46 Auf der Klemmenseite kann der Schirm ebenfalls aufgelegt werden. Verdrahten Sie die Adern der Feedbackleitung und befestigen Sie das kupferummantelte Ende der Feedbackleitung mit der Schirmschelle 7 an der Schirmschiene 3 bzw. Schirmschienen-Bügel 3a. Motor- und Feedbackleitung können zusammen mit der Schraube 8 der Schirmschelle 7 aufgelegt werden. Version: 1.2 EL7411...
-
Seite 47: Hinweise Zur Strommessung Über Hall-Sensor
- Strom 10 A: 12 mm - Strom 20 A: 25 mm - Strom 40 A: 50 mm Wenn es in der Gerätedokumentation nicht anders spezifiziert ist, ist das Aneinanderreihen von Mo- dulen (z. B. Reihenklemmen im 12 mm Rastermaß) gleichen Typs (z. B. EL2212-0000) darüber hin- aus zulässig. EL7411 Version: 1.2... -
Seite 48: Leds
Hall-Sensor W Input 1 grün Am Eingang „Input 1“ liegt ein High-Pegel an. ENC B grün Am Encoder-Eingang B liegt ein Signal an. Hall V grün Hall-Sensor V Input 2 grün Am Eingang „Input 2“ liegt ein High-Pegel an. Version: 1.2 EL7411... - Seite 49 Das Lüftermodul ist angeschlossen und funktioniert fehlerfrei. 6‘ 7‘ 8‘ grün Die Elektronik-Versorgungsspannung ist vorhanden 9‘ 10‘ Limit gelb Limit 11‘ Warning gelb Warnung 12‘ Error Fehler 13‘ Mode grün Lüftermodul Signal „Mode“ 14‘ 15‘ 16‘ grün Die Lastspannung ist vorhanden EL7411 Version: 1.2...
-
Seite 50: Anschlussbelegung
Eingang für das Encoder-Signal A- ENC B- Eingang für das Encoder-Signal B- ENC C- Eingang für das Encoder-Signal C- Hall-Sensor V Eingang für Hall-Sensor V Hall-Sensor Versorgung GND GND für die Hall-Sensoren Input 2 Digitaler Eingang 24 V Version: 1.2 EL7411... -
Seite 51: Die Lastspannung Ist Nicht Kurzschlussfest
Ausgang für das Signal „Mode“ des Lüftermoduls ZB8610. 11‘ 12‘ Motorphase V Motorphase V 13‘ HW Enable Eingang zum Freigeben der Endstufe 14‘ Motorbremse GND GND für die Motorbremse 15‘ Lastspannung GND GND für die Lastspannung 16‘ Lastspannung GND GND für die Lastspannung EL7411 Version: 1.2... -
Seite 52: Ul Hinweise - Compact Motion
The modules are intended for use with Beckhoff’s UL Listed EtherCAT System only. VORSICHT Examination For cULus examination, the Beckhoff I/O System has only been investigated for risk of fire and electrical shock (in accordance with UL508 and CSA C22.2 No. 142). VORSICHT For devices with Ethernet connectors Not for connection to telecommunication circuits. -
Seite 53: Entsorgung
Installation 4.12 Entsorgung Mit einer durchgestrichenen Abfalltonne gekennzeichnete Produkte dürfen nicht in den Hausmüll. Das Gerät gilt bei der Entsorgung als Elektro- und Elektronik-Altgerät. Die nationalen Vorgaben zur Entsorgung von Elektro- und Elektronik-Altgeräten sind zu beachten. EL7411 Version: 1.2... -
Seite 54: Twincat Entwicklungsumgebung
In den folgenden Kapiteln wird dem Anwender die Inbetriebnahme der TwinCAT Entwicklungsumgebung auf einem PC System der Steuerung sowie die wichtigsten Funktionen einzelner Steuerungselemente erläutert. Bitte sehen Sie weitere Informationen zu TwinCAT 2 und TwinCAT 3 unter http://infosys.beckhoff.de/. Installation TwinCAT Realtime Treiber Um einen Standard Ethernet Port einer IPC Steuerung mit den nötigen Echtzeitfähigkeiten auszurüsten, ist... - Seite 55 Abb. 29: Aufruf im System Manager (TwinCAT 2) Unter TwinCAT 3 ist dies über das Menü unter „TwinCAT“ erreichbar: Abb. 30: Aufruf in VS Shell (TwinCAT 3) B: Über TcRteInstall.exe im TwinCAT-Verzeichnis Abb. 31: TcRteInstall.exe im TwinCAT-Verzeichnis In beiden Fällen erscheint der folgende Dialog: EL7411 Version: 1.2...
- Seite 56 TwinCAT 3: Die Eigenschaften des EtherCAT-Gerätes können mit Doppelklick auf „Gerät .. (EtherCAT)“ im Projektmappen-Explorer unter „E/A“ geöffnet werden: Nach der Installation erscheint der Treiber aktiviert in der Windows-Übersicht der einzelnen Netzwerkschnittstelle (Windows Start → Systemsteuerung → Netzwerk) Version: 1.2 EL7411...
- Seite 57 TwinCAT Entwicklungsumgebung Abb. 34: Windows-Eigenschaften der Netzwerkschnittstelle Eine korrekte Einstellung des Treibers könnte wie folgt aussehen: Abb. 35: Beispielhafte korrekte Treiber-Einstellung des Ethernet Ports Andere mögliche Einstellungen sind zu vermeiden: EL7411 Version: 1.2...
- Seite 58 TwinCAT Entwicklungsumgebung Abb. 36: Fehlerhafte Treiber-Einstellungen des Ethernet Ports Version: 1.2 EL7411...
- Seite 59 IP-Adresse für diesen Port zu vergeben und DHCP zu deaktivieren. Dadurch entfällt die Wartezeit, bis sich der DHCP-Client des Ethernet Ports eine Default-IP-Adresse zuteilt, weil er kei- ne Zuteilung eines DHCP-Servers erhält. Als Adressraum empfiehlt sich z. B. 192.168.x.x. Abb. 37: TCP/IP-Einstellung des Ethernet Ports EL7411 Version: 1.2...
-
Seite 60: Hinweise Esi-Gerätebeschreibung
Die Bestellbezeichnung aus Typ + Version (hier: EL2521-0010) beschreibt die Funktion des Gerätes. Die Revision gibt den technischen Fortschritt wieder und wird von Beckhoff verwaltet. Prinzipiell kann ein Gerät mit höherer Revision ein Gerät mit niedrigerer Revision ersetzen, wenn z. B. in der Dokumentation nicht anders angegeben. - Seite 61 Revision in die Konfiguration zulässt. Üblicherweise bringt eine neue/größere Revision auch neue Features mit. Wenn diese nicht genutzt werden sollen, kann ohne Bedenken mit der bisherigen Revision 1018 in der Konfiguration weitergearbeitet werden. Dies drückt auch die Beckhoff Kompatibili- tätsregel aus.
-
Seite 62: Onlinedescription Unter Twincat
(Spracheinstellungen des Betriebssystems beachten!) Diese Datei ist im gleichen Zuge wie die andere Datei zu löschen. Fehlerhafte ESI-Datei Liegt eine fehlerhafte ESI-Datei vor die vom System Manager nicht eingelesen werden kann, meldet dies der System Manager durch ein Hinweisfenster. Version: 1.2 EL7411... - Seite 63 Ursachen dafür können sein • Aufbau der *.xml entspricht nicht der zugehörigen *.xsd-Datei → prüfen Sie die Ihnen vorliegenden Schemata • Inhalt kann nicht in eine Gerätebeschreibung übersetzt werden → Es ist der Hersteller der Datei zu kontaktieren EL7411 Version: 1.2...
-
Seite 64: Twincat Esi Updater
TwinCAT Entwicklungsumgebung TwinCAT ESI Updater Ab TwinCAT 2.11 kann der System Manager bei Online-Zugang selbst nach aktuellen Beckhoff ESI-Dateien suchen: Abb. 44: Anwendung des ESI Updater (>=TwinCAT 2.11) Der Aufruf erfolgt unter: „Options“ → „Update EtherCAT Device Descriptions“. Auswahl bei TwinCAT 3: Abb. 45: Anwendung des ESI Updater (TwinCAT 3) Der ESI Updater ist eine bequeme Möglichkeit, die von den EtherCAT Herstellern bereitgestellten ESIs... -
Seite 65: Offline Konfigurationserstellung
Für eine EtherCAT I/O Anwendung mit EtherCAT Slaves ist der „EtherCAT“ Typ auszuwählen. „EtherCAT Automation Protocol via EL6601“ ist für den bisherigen Publisher/Subscriber-Dienst in Kombination mit einer EL6601/EL6614 Klemme auszuwählen. Abb. 47: Auswahl EtherCAT Anschluss (TwinCAT 2.11, TwinCAT 3) Diesem virtuellen Gerät ist dann ein realer Ethernet Port auf dem Laufzeitsystem zuzuordnen. EL7411 Version: 1.2... -
Seite 66: Auswahl Ethernet Port
Es können nur Ethernet Ports für ein EtherCAT Gerät ausgewählt werden, für die der TwinCAT Re- altime-Treiber installiert ist. Dies muss für jeden Port getrennt vorgenommen werden. Siehe dazu die entsprechende Installationsseite [} 54]. Definieren von EtherCAT Slaves Durch Rechtsklick auf ein Gerät im Konfigurationsbaum können weitere Geräte angefügt werden. Version: 1.2 EL7411... - Seite 67 Das Suchfeld erleichtert das Auffinden eines bestimmten Gerätes (ab TwinCAT 2.11 bzw. TwinCAT 3). Abb. 51: Auswahldialog neues EtherCAT Gerät Standardmäßig wird nur der Name/Typ des Gerätes als Auswahlkriterium verwendet. Für eine gezielte Auswahl einer bestimmen Revision des Gerätes kann die Revision als „Extended Information“ eingeblendet werden. EL7411 Version: 1.2...
-
Seite 68: Geräte-Auswahl Nach Revision, Kompatibilität
Oft sind aus historischen oder funktionalen Gründen mehrere Revisionen eines Gerätes erzeugt worden, z. B. durch technologische Weiterentwicklung. Zur vereinfachten Anzeige (s. Abb. „Auswahldialog neues EtherCAT Gerät“) wird bei Beckhoff Geräten nur die letzte (=höchste) Revision und damit der letzte Produktionsstand im Auswahldialog angezeigt. Sollen alle im System als ESI-Beschreibungen vorliegenden Revisionen eines Gerätes angezeigt werden, ist die Checkbox „Show Hidden Devices“... - Seite 69 Abb. 54: Name/Revision Klemme Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden.
-
Seite 70: Online Konfigurationserstellung
Im Konfigurationsbaum bringt uns ein Rechtsklick auf den General-Punkt „I/O Devices“ zum Such-Dialog. Abb. 57: Scan Devices (links: TwinCAT 2; rechts: TwinCAT 3) Dieser Scan-Modus versucht nicht nur EtherCAT-Geräte (bzw. die als solche nutzbaren Ethernet-Ports) zu finden, sondern auch NOVRAM, Feldbuskarten, SMB etc. Nicht alle Geräte können jedoch automatisch gefunden werden. Version: 1.2 EL7411... -
Seite 71: Funktionsweise Online Scan
Beim Scan fragt der Master die Identity Informationen der EtherCAT Slaves aus dem Slave-EE- PROM ab. Es werden Name und Revision zur Typbestimmung herangezogen. Die entsprechenden Geräte werden dann in den hinterlegten ESI-Daten gesucht und in dem dort definierten Default-Zu- stand in den Konfigurationsbaum eingebaut. Abb. 60: Beispiel Default-Zustand EL7411 Version: 1.2... -
Seite 72: Slave-Scan In Der Praxis Im Serienmaschinenbau
Konfiguration. Ebenso werden eventuell von A weltweit Ersatzteillager für die kommenden Serienmaschinen mit Klemmen EL2521-0025-1018 angelegt. Nach einiger Zeit erweitert Beckhoff die EL2521-0025 um ein neues Feature C. Deshalb wird die FW geändert, nach außen hin kenntlich durch einen höheren FW-Stand und eine neue Revision -1019. - Seite 73 Die Konfiguration wird aufgebaut und kann danach gleich in den Online-Zustand (OPERATIONAL) versetzt werden. Abb. 66: Abfrage Config/FreeRun (links: TwinCAT 2; rechts TwinCAT 3) Im Config/FreeRun-Mode wechselt die System Manager Anzeige blau/rot und das EtherCAT Gerät wird auch ohne aktive Task (NC, PLC) mit der Freilauf-Zykluszeit von 4 ms (Standardeinstellung) betrieben. EL7411 Version: 1.2...
- Seite 74 In diesem Fall bietet der System Manager an, die im Gerät eventuell vorliegende ESI auszulesen. Lesen Sie dazu das Kapitel „Hinweise zu ESI/XML“. • Teilnehmer werden nicht richtig erkannt Ursachen können sein ◦ fehlerhafte Datenverbindungen, es treten Datenverluste während des Scans auf ◦ Slave hat ungültige Gerätebeschreibung Version: 1.2 EL7411...
-
Seite 75: Veränderung Der Konfiguration Nach Vergleich
Bei diesem Scan werden z. Z. (TwinCAT 2.11 bzw. 3.1) nur die Geräteeigenschaften Vendor (Hersteller), Gerätename und Revision verglichen! Ein „ChangeTo“ oder „Copy“ sollte nur im Hinblick auf die Beckhoff IO-Kompatibilitätsregel (s. o.) nur mit Bedacht vorgenommen werden. Das Gerät wird dann in der Konfigu- ration gegen die vorgefundene Revision ausgetauscht, dies kann Einfluss auf unterstützte Prozessdaten... - Seite 76 Geräte die Funktionen der Vorgänger-Geräte unterstützen sollen. Ist die gefundene Revision < als die konfigurierte Revision, ist der Einsatz vermutlich nicht möglich. Eventuell unterstützt das vorgefundene Gerät nicht alle Funktionen, die der Master von ihm aufgrund der höheren Revision erwartet. Version: 1.2 EL7411...
- Seite 77 Abb. 73: Name/Revision Klemme Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden.
-
Seite 78: Ethercat Teilnehmerkonfiguration
ESI-EEPROM überschrieben - deshalb ist dieser Vorgang nur im Online-Zustand (ConfigMode) möglich. EtherCAT Teilnehmerkonfiguration Klicken Sie im linken Fenster des TwinCAT 2 System Managers bzw. bei der TwinCAT 3 Entwicklungsumgebung im Projektmappen-Explorer auf das Element der Klemme im Baum, die Sie konfigurieren möchten (im Beispiel: Klemme 3: EL3751). Version: 1.2 EL7411... - Seite 79 Laufende Nr. des EtherCAT-Geräts Typ des EtherCAT-Geräts Kommentar Hier können Sie einen Kommentar (z. B. zum Anlagenteil) hinzufügen. Disabled Hier können Sie das EtherCAT-Gerät deaktivieren. Symbole erzeugen Nur wenn dieses Kontrollkästchen aktiviert ist, können Sie per ADS auf diesen EtherCAT-Slave zugreifen. EL7411 Version: 1.2...
- Seite 80 Zeigt die (Allgemeine Slave PDO-) Konfiguration der Prozessdaten an. Die Eingangs- und Ausgangsdaten des EtherCAT-Slaves werden als CANopen Prozess-Daten-Objekte (Process Data Objects, PDO) dargestellt. Falls der EtherCAT-Slave es unterstützt, ermöglicht dieser Dialog dem Anwender ein PDO über PDO-Zuordnung auszuwählen und den Inhalt des individuellen PDOs zu variieren. Version: 1.2 EL7411...
- Seite 81 Prozessdaten (Größe in Bit/Bytes, Quellort, Übertragungsart) er von oder zu diesem Slave übermitteln möchte. Eine falsche Konfiguration kann einen erfolgreichen Start des Slaves verhindern. Für Beckhoff EtherCAT Slaves EL, ES, EM, EJ und EP gilt im Allgemeinen: • Die vom Gerät unterstützten Prozessdaten Input/Output sind in der ESI/XML-Beschreibung herstellerseitig definiert.
-
Seite 82: Manuelle Veränderung Der Prozessdaten
Karteireiters können Sie betrachten, welche Download-Requests während des Startups zur Mailbox gesendet werden. Es ist auch möglich neue Mailbox-Requests zur Listenanzeige hinzuzufügen. Die Download-Requests werden in derselben Reihenfolge zum Slave gesendet, wie sie in der Liste angezeigt werden. Version: 1.2 EL7411... - Seite 83 Karteireiter CoE - Online angezeigt. Dieser Dialog listet den Inhalt des Objektverzeichnisses des Slaves auf (SDO-Upload) und erlaubt dem Anwender den Inhalt eines Objekts dieses Verzeichnisses zu ändern. Details zu den Objekten der einzelnen EtherCAT-Geräte finden Sie in den gerätespezifischen Objektbeschreibungen. EL7411 Version: 1.2...
- Seite 84 Das Objekt kann ausgelesen und Daten können in das Objekt geschrieben werden (Read/Write) Das Objekt kann ausgelesen werden, es ist aber nicht möglich Daten in das Objekt zu schreiben (Read only) Ein zusätzliches P kennzeichnet das Objekt als Prozessdatenobjekt. Wert Wert des Objekts Version: 1.2 EL7411...
- Seite 85 Slave hochgeladen. In der untenstehenden Liste können Sie festlegen welche Objekt-Typen hochgeladen werden sollen. Offline - über EDS-Datei Wenn dieses Optionsfeld angewählt ist, wird die Liste der im Objektverzeichnis enthaltenen Objekte aus einer EDS-Datei gelesen, die der Anwender bereitstellt. Karteireiter „Online“ Abb. 85: Karteireiter „Online“ EL7411 Version: 1.2...
- Seite 86 Carrier-Signal ist am Port vorhanden, der Port ist aber geschlossen. File Access over EtherCAT Download Mit dieser Schaltfläche können Sie eine Datei zum EtherCAT-Gerät schreiben. Upload Mit dieser Schaltfläche können Sie eine Datei vom EtherCAT-Gerät lesen. Karteireiter „DC“ (Distributed Clocks) Abb. 86: Karteireiter „DC“ (Distributed Clocks) Version: 1.2 EL7411...
-
Seite 87: Detaillierte Beschreibung Karteireiter „Prozessdaten
• DC-Synchron (Input based) • DC-Synchron Erweiterte Einstellungen… Erweiterte Einstellungen für die Nachregelung der echtzeitbestimmende TwinCAT-Uhr Detaillierte Informationen zu Distributed Clocks sind unter http://infosys.beckhoff.de angegeben: Feldbuskomponenten → EtherCAT-Klemmen → EtherCAT System Dokumentation → Distributed Clocks 5.7.1 Detaillierte Beschreibung Karteireiter „Prozessdaten“ Sync-Manager Listet die Konfiguration der Sync-Manager (SM) auf. -
Seite 88: Import/Export Von Ethercat-Teilnehmern Mittels Sci Und Xti
• Zyklische Prozessdaten (PDO) • Synchronisierung (Distributed Clocks, FreeRun, SM‑Synchron) • CoE‑Parameter (azyklisches Objektverzeichnis) Hinweis: je nach Slave sind nicht alle drei Elemente vorhanden. Zum besseren Verständnis der Export/Import‑Funktion wird der übliche Ablauf bei der IO‑Konfiguration betrachtet: Version: 1.2 EL7411... - Seite 89 • innerhalb der TwinCAT‑Umgebung: Export/Import als xti‑Datei oder • außerhalb, d.h. TwinCAT‑Grenzen überschreitend: Export/Import als sci‑Datei. Zur Veranschaulichung im Folgenden ein Beispiel: eine EL3702‑Klemme in Standard‑Einstellung wird auf 2‑fach Oversampling umgestellt (blau) und das optionale PDO „StartTimeNextLatch“ wahlweise hinzugefügt (rot): EL7411 Version: 1.2...
-
Seite 90: Das Vorgehen Innerhalb Twincat Mit Xti-Dateien
Die beiden genannten Methoden für den Export und Import der veränderten Klemme werden im Folgenden demonstriert. 5.8.2 Das Vorgehen innerhalb TwinCAT mit xti‑Dateien Jedes IO Gerät kann einzeln exportiert/abgespeichert werden: Die xti‑Datei kann abgelegt: und in einem anderen TwinCAT System über „Insert Existing item“ wieder importiert werden: Version: 1.2 EL7411... -
Seite 91: Das Vorgehen Innerhalb Und Außerhalb Twincat Mit Sci-Datei
Die Slave Configuration Information (SCI) beschreibt eine bestimmte vollständige Konfiguration für einen EtherCAT Slave (Klemme, Box, Antrieb…) basierend auf den Einstellungsmöglichkeiten der Gerätebeschreibungsdatei (ESI, EtherCAT Slave Information). Das heißt, sie umfasst PDO, CoE, Synchronisierung. Export: • einzelnes Gerät (auch Mehrfachauswahl möglich) über das Menü auswählen: TwinCAT → EtherCAT Devices → Export SCI. EL7411 Version: 1.2... - Seite 92 CoE | Set cycle ti- Die konfigurierte Zykluszeit wird exportiert. Üblicherweise ist diese netzwerkabhängig und me(0x1C3x.2) kann nicht immer vorab bestimmt werden. Referenz auf die ursprüngliche ESI Datei. Export SCI Datei speichern. Version: 1.2 EL7411...
- Seite 93 Es werden alle Slaves für den Export selektiert. ◦ None: Es werden alle Slaves abgewählt. • Die sci‑Datei kann lokal abgespeichert werden: • Es erfolgt der Export: Import • Eine sci‑Beschreibung kann wie jede normale Beckhoff‑Gerätebeschreibung manuell in die TwinCAT‑Konfiguration eingefügt werden. EL7411 Version: 1.2...
- Seite 94 TwinCAT Entwicklungsumgebung • Die sci‑Datei muss im TwinCAT‑ESI‑Pfad liegen, i.d.R. unter: C:\TwinCAT\3.1\Config\Io\EtherCAT • Öffnen des Auswahl‑Dialogs: • SCI‑Geräte anzeigen und gewünschtes Gerät auswählen und einfügen: Version: 1.2 EL7411...
- Seite 95 Standard Einstellung, ob die Module bestehen bleiben. Generic Reload Devices Einstellung, ob vor dem SCI Export das Kommando „Reload Devices“ ausge- führt wird. Dies wird dringend empfohlen, um eine konsistente Slave‑Konfiguration zu ge- währleisten. SCI‑Fehlermeldungen werden bei Bedarf im TwinCAT Logger Output‑Fenster angezeigt: EL7411 Version: 1.2...
-
Seite 96: Inbetriebnahme
Die Brems-Chopper-Klemme kann erforderlich sein, wenn bei Bremsvorgängen zu viel Energie auf die Lastspannung zurückgespeist wird. • Das Lüftermodul ZB8610. Mit dem Lüftermodul ist ein höherer maximaler Ausgangsstrom möglich. Freigabe der Endstufe Legen Sie 24 V an den Eingang „HW Enable“ an, um die Achse freigeben zu können. Version: 1.2 EL7411... -
Seite 97: Einbindung In Twincat
Wenn Sie die TwinCAT NC-Funktionen nutzen wollen, klicken Sie auf OK (empfohlen). Diese Entscheidung ist unverbindlich. Sie können die Verknüpfung mit einer NC-Achse auch später noch herstellen. Siehe Kapitel „Einbindung in die NC-Konfiguration“, Abschnitt Achse manuell hinzufügen [} 116]. EL7411 Version: 1.2... -
Seite 98: Auswahl Der Betriebsart
CSP ist aber performanter. Einstellung der Betriebsart Gehen Sie wie folgt vor, um die gewählte Betriebsart einzustellen: 1. Den Karteireiter „CoE – Online“ anklicken. 2. Im Parameter 7010:03 „Modes of operation“ die Betriebsart einstellen. 3. Den Karteireiter „Process Data“ anklicken. Version: 1.2 EL7411... - Seite 99 Inbetriebnahme 4. „Predefined PDO Assignment“ anklicken. 5. Den richtigen Eintrag gemäß der folgenden Tabelle wählen: Betriebsart „Predefined PDO Assignment“ „Position“ „Velocity“ „Torque“ CSTCA „Torque“ Für die Betriebsart CSTCA müssen zusätzliche Prozessdaten aktiviert werden. Siehe Kapitel CSTCA [} 103]. EL7411 Version: 1.2...
-
Seite 100: Csp
Zeit um mehr als die im Following error window eingetragene Position überschritten wird, gibt die Klemme einen Fehler aus und bleibt unverzüglich stehen. • Der aktuelle Schleppfehler kann im Following error actual value (Index 0x6010:06) ausgelesen werden. Version: 1.2 EL7411... - Seite 101 Inbetriebnahme Abb. 88: Schleppfehler über die Zeit Der Wert 0xFFFFFF (-1) im Following error window bedeutet, dass die Schleppfehlerüberwachung ausgeschaltet ist und entspricht dem Auslieferungszustand. Der Following error time out ist im Auslieferungszustand 0x0000 (0). EL7411 Version: 1.2...
-
Seite 102: Csv
Architektur an der gleichen Stelle gerechnet werden. 6.3.3 Drehmomentregelung CST ist die Abkürzung für „Cyclic synchronous torque“. Über die Variable „Target torque“ kann ein definiertes Drehmoment eingestellt werden. Sie können die TwinCAT NC nicht zur Vorgabe des Drehmoments verwenden. Version: 1.2 EL7411... -
Seite 103: Cstca
2. Im Feld „Sync Manager“ auf „Outputs“ klicken. 3. Im Feld „PDO Assignment (0x1C12)“ bei 0x1603 einen Haken setzen. ð Falls die Klemme mit einer NC-Achse verknüpft ist, erscheint ein Dialogfenster: Klicken Sie im Dialogfenster auf „Nein“. EL7411 Version: 1.2... -
Seite 104: Konfiguration Der Hardware
Konfigurieren Sie das Feedback wie in den folgenden Kapiteln beschrieben. Zulässige Kombinationen von Feedback und Betriebsart Betriebsart Feedback Ein Inkremental-En- Ein Inkremental-En- Nur Hall-Sensoren Kein Feedback coder coder + Hall-Senso- CSTCA Nein Nein Nein Nein Freischalten mit 0x8010:54 Feature bits = 0x100 Version: 1.2 EL7411... -
Seite 105: Betrieb Ohne Feedback
Konfiguration 1. Den Parameter 8010:64 „Commutation type“ auf den Wert „FOC with incremental encoder and hall“ einstellen. 2. Den Inkremental-Encoder konfigurieren. Siehe Kapitel Konfiguration des Inkremental-Encoders [} 106]. 3. Die Hall-Sensoren konfigurieren. Siehe Kapitel Konfiguration der Hall-Sensoren [} 108]. EL7411 Version: 1.2... - Seite 106 Falls Sie einen Inkremental-Encoder einsetzen, konfigurieren Sie ihn mit den folgenden CoE-Parametern: Index Bezeichnung Einheit 8008:01 Invert feedback direction 8008:02 Enable power supply 8008:05 Enable ENC C input 8008:11 Supply voltage output [} 107] 8008:12 Encoder type [} 107] 8008:13 Inc/U Encoder Increments per Revolution [} 107] Version: 1.2 EL7411...
- Seite 107 Multiplizieren Sie die Anzahl der Inkremente des Encoders mit dem Faktor vier. Tragen Sie das Ergebnis in diesen Parameter ein. Falls Sie einen magnetischen Encoder mit Interpolation einsetzen, berechnen Sie die Anzahl der Inkremente nach der folgenden Formel: Beispiel: EL7411 Version: 1.2...
-
Seite 108: Konfiguration Der Hall-Sensoren
800A:14 Hall sensor type Signaltyp Spezifikation Bemerkung (0) disabled Hallsensorinterface Wird bei FOC mit Inkrementalencoder vom DM2 deaktiviert deaktiviert (1) Open collector 5 V bezogen auf Hallsensor schaltet gegen Ground. Es sind klemmeninternen Pull- digitale Hallsensoren zu verwenden. Up-Widerstand Version: 1.2 EL7411... -
Seite 109: Konfiguration Des Motors Und Des Verstärkers
Siehe Kapitel Konfiguration des Feedback [} 104]. Es gibt Szenarien, in denen die Kommutierungsfindung wiederholt werden muss, sobald die Ausrichtung des Feedbacks zum Motor nicht mehr bekannt ist. Ursachen dafür sind beispielsweise ein Powercycle des Encoders oder eine zwischenzeitliche Betriebsmodus-änderung. EL7411 Version: 1.2... - Seite 110 Voltage constant Die Spannungskonstante des Motors. µV / min Die Gegen-EMK des Motors ist abhängig von der Drehzahl. Die Spannungskonstante setzt beide Werte in Bezug. Dieser Wert ist wichtig für die korrekte Regelung des Motors. Für Linearachsen siehe Kapitel: Sonderfall Linearachse [} 111]. Version: 1.2 EL7411...
- Seite 111 Formel mit zwei multipliziert. Beispiel: • Nenngeschwindigkeit v = 544 mm/s nenn • Polteilung = 16 mm 8011:31 Voltage constant Rechnen Sie die Spannungskonstante k wie folgt um. Beachten Sie die Einheiten. Beispiel: • Polteilung = 16 mm • Spannungskonstante k = 6,8 V/(m/s) EL7411 Version: 1.2...
-
Seite 112: Scannen Der Hardware
Inbetriebnahme 6.4.3 Scannen der Hardware EL7411 kann vorhandene Hardware selbstständig scannen. Dabei werden bestimmte Parameter der Hardware ermittelt und in den entsprechenden Einträgen im CoE gespeichert. Abweichende Vorgehensweise mit TwinCAT 2 • Siehe Kapitel Scannen der Hardware mit TwinCAT 2 [} 115]. 6.4.3.1 Scan Motor Die folgenden Parameter werden bei dem Vorgang „Scan Motor“... - Seite 113 Die Werte 0x100…0x199 entsprechen 0…99 %. 4. Warten, bis das Register FB00:02 „Status“ einen der folgenden Werte hat: 0, 1, 2, 3. ð Wert 0: Der Scan wurde erfolgreich abgeschlossen. ð Wert 3: Fehler. Siehe Kapitel Fehlerdiagnose [} 115]. EL7411 Version: 1.2...
- Seite 114 ð Wert 0: Der Scan wurde erfolgreich abgeschlossen. ð Wert 3: Fehler. Siehe Kapitel Fehlerdiagnose [} 115]. 4. Diag History prüfen: der Fehler 0x8420 bedeutet, dass der Regler ungenügend optimiert ist. Sie können die Cogging-Kompensation im CoE-Parameter 8010:05 „Enable cogging torque compensation“ aktivieren. Version: 1.2 EL7411...
-
Seite 115: Scannen Der Hardware Mit Twincat
Es ist ein Fehler aufgetreten. Prüfen Sie die Diag History [} 164]. xx 00 04 00 00 00 Invalid EtherCAT state EL7411 ist nicht im EtherCAT-Status OP. Ein Fehler muss nicht quittiert werden. Falls ein Scan mit einer Fehlermeldung abgebrochen wurde, können Sie einfach einen neuen Scan starten. 6.4.3.5 Scannen der Hardware mit TwinCAT 2... -
Seite 116: Inbetriebnahme Mit Der Twincat Nc
• Fügen Sie zuerst einen neuen Task an. Dazu klicken Sie mit der rechten Maustaste auf NC- Konfiguration und wählen Sie "Task Anfügen..." aus (siehe Abb. Neuen Task einfügen). • Benennen Sie gegebenenfalls den Task um und bestätigen Sie mit OK. Version: 1.2 EL7411... - Seite 117 • Wählen Sie unter Typ eine Kontinuierliche Achse aus und bestätigen Sie mit OK (siehe Abb. Achsentyp auswählen und bestätigen). Abb. 92: Achsentyp auswählen und bestätigen • Markieren Sie Ihre Achse mit der linken Maustaste. Unter der Registerkarte Einstellungen wählen Sie "Verknüpft mit..." aus (siehe Abb. Verknüpfung der Achse mit der Klemme). EL7411 Version: 1.2...
- Seite 118 • Wählen Sie die passende Klemme aus (CANopen DS402, EtherCAT CoE) und bestätigen Sie mit "OK ". Abb. 94: Auswahl der richtigen Klemme • Alle wichtigen Verknüpfungen zwischen der NC-Konfiguration und der Klemme werden dadurch automatisch durchgeführt (siehe Abb. Automatische Verknüpfung aller wichtigen Variablen) Version: 1.2 EL7411...
- Seite 119 • Damit der Motor in Betrieb genommen werden kann, müssen noch einige Parameter eingestellt werden. Die Werte entnehmen Sie dem Kapiteln "Einstellungen im CoE" und "Einstellungen in der NC". Stellen Sie bitte diese Parameter ein, bevor Sie mit der Inbetriebnahme des Motors fortfahren. EL7411 Version: 1.2...
-
Seite 120: Konfiguration Der Twincat Nc
Diese Einstellung legt die Einheiten der Parameter der Achse fest. Sie finden diese Einstellung unter: NC-Achse > Karteireiter „Settings“ > Drop-Down-Menü „Unit“. • Für rotatorische Bewegungen wählen Sie ° oder „Degree“. • Für lineare Bewegungen wählen Sie mm oder m. Version: 1.2 EL7411... - Seite 121 Empfehlung: tragen Sie für die „Reference Velocity“ die Nenndrehzahl bzw. Nenngeschwindigkeit ein. Dynamik Sie finden die Dynamik-Parameter unter: NC-Achse > Karteireiter „Dynamics“ Stellen Sie die Hochlaufzeit und die Bremszeit ein: „Acceleration Time“ und „Deceleration Time“. Wählen Sie den Rampenverlauf über die Schieberegler. EL7411 Version: 1.2...
- Seite 122 ◦ Tragen Sie das Ergebnis in den Parameter „Scaling Factor Denominator“ ein. Beispiel: Die Auflösung des Inkremental-Encoders ist mit 512 Inc / (2 mm) angegeben. Das entspricht 256 Inc / mm. Tragen Sie für den „Scaling Factor Denominator“ ein: 256 x 4 = 1024. Version: 1.2 EL7411...
- Seite 123 Die Berechnung ist abhängig davon, ob Sie einen Inkremental-Encoder einsetzen: • Für den Betrieb mit einem Inkremental-Encoder: Beispiel: für einen Encoder mit 1024 Inkrementen pro Umdrehung ergibt sich eine Ausgabeskalierung von 10,98632813. • Für den Betrieb ohne Inkremental-Encoder: EL7411 Version: 1.2...
-
Seite 124: Durchführung Eines Testlaufs
3. Die Motorwelle mit der Hand bewegen, um die Konfiguration des Encoders zu prüfen. Entspricht eine Relativbewegung von 360° tatsächlich einer vollen Umdrehung der Motorwelle? ð Falls nicht: Skalierungsfaktor prüfen. Siehe Kapitel Konfiguration der TwinCAT NC [} 120], Abschnitt „Skalierungsfaktor“. Version: 1.2 EL7411... -
Seite 125: Der Motor Verhält Sich Möglicherweise Anders Als Erwartet
Schritt 3: Ergebnis prüfen Prüfen Sie zum Beispiel folgende Punkte: • Wurden in der Diag History Fehler gemeldet? Siehe Kapitel Diag History [} 164]. • Dreht sich der Motor in die erwartete Richtung? • Entspricht die Geschwindigkeit der Vorgabe? EL7411 Version: 1.2... -
Seite 126: Regleroptimierung
Position Istwert Geschwindigkeit Sollwert Geschwindigkeit Istwert 6. Im Solution Explorer die Achse anklicken. 7. Karteireiter „Functions“ anklicken. 8. Im Drop-Down-Menü „Start Mode“: „Reversing Sequence“ auswählen. 9. Dynamik und Geschwindigkeit so einstellen wie in der realen Anwendung benötigt. Version: 1.2 EL7411... - Seite 127 Inbetriebnahme Die weitere Vorgehensweise ist abhängig davon, welches Feedback angeschlossen und konfiguriert ist: • Kein Feedback, sensorloser Betrieb [} 130] • Nur Hall-Sensoren [} 129] • Ein Inkremental-Encoder [} 128] und optional Hall-Sensoren EL7411 Version: 1.2...
- Seite 128 Schritt 3: Optimierung des Positionsreglers ü Voraussetzung: der Geschwindigkeitsregler ist optimiert. 1. Den Proportionalanteil 8010:17 „Position loop proportional gain“ schrittweise erhöhen, bis der Regler anfängt zu schwingen. 2. Den Proportionalanteil um 20 % verringern. ð Der Positionsregler ist optimiert. Version: 1.2 EL7411...
- Seite 129 ü Voraussetzung: Der Geschwindigkeitsregler ist optimiert. 1. Den Proportionalanteil 8010:17 „Position loop proportional gain“ schrittweise erhöhen, so dass die Positionsdifferenz um der Wert Null pendelt und der Sollwertvorgabe der Position passend gefolgt wird. ð Der Positionsregler ist optimiert. EL7411 Version: 1.2...
-
Seite 130: Kein Feedback-System: Sensorloser Betrieb
ü Voraussetzung: Der Geschwindigkeitsregler ist optimiert. 1. Den Proportionalanteil 8010:17 „Position loop proportional gain“ schrittweise erhöhen bis zum schwingenden Verhalten. 2. Den Proportionalanteil um 20 % reduzieren. Die 20 % dienen als Regelreserve für abrupte Bewegungen. ð Der Positionsregler ist optimiert. Version: 1.2 EL7411... -
Seite 131: Homing / Referenzfahrt
Die Vorgehensweise zur Konfiguration ist abhängig davon, wie Sie das Schaltsignal an die TwinCAT NC übermitteln. Die folgenden Optionen stehen zur Verfügung: • Anlegen eines 24 V-Schaltsignals an einen digitalen Eingang von EL7411. Konfiguration [} 131] • Übermitteln eines beliebigen Signals aus der SPS. - Seite 132 3. Den Parameter „Homing Sensor Source“ auf „Digital Input 1 (Active High), device depending mapping“ setzen. 4. Im Solution Explorer: Die EL7411 anklicken, den Karteireiter „Process Data“ öffnen, den Sync Manager 3 „Inputs“ auswählen und das PDO Assignment 0x1A10 aktivieren. ð Das Prozessdatenobjekt „DI Inputs“ ist aktiviert.
- Seite 133 Inbetriebnahme 6. „All Types“ anklicken, die Variable „nState8“ auswählen und mit „OK“ bestätigen. ð Ein Dialogfenster erscheint. 7. Mit „OK“ bestätigen. EL7411 Version: 1.2...
- Seite 134 Navigieren zu PLC > „References“, Rechtsklick, „Add Library…“ 9. In der SPS eine Instanz des Funktionsbausteins „MC_Home“ aus der Bibliothek „Tc2_MC2“ einfügen. Den Eingang „bCalibrationCam“ nicht beschalten. ð Sie können die Referenzfahrt mit einer positiven Flanke am Eingang „Execute“ starten. Version: 1.2 EL7411...
-
Seite 135: Schaltsignal Aus Der Sps (Plc Camming)
NC-Achse > „ENC“ anklicken, den Karteireiter „Parameter“ öffnen und den Abschnitt „Homing“ aufklappen. 2. Den Parameter „Reference Mode (Sync condition)“ auf „Homing Sensor Only (PLC cam or digital input 1..8)“ setzen. 3. Den Parameter „Homing Sensor Source“ auf „Default: PLC Cam (MC_Home)“ setzen. EL7411 Version: 1.2... - Seite 136 5. In der SPS eine Instanz des Funktionsbausteins „MC_Home“ aus „Tc2_MC2“ einfügen. 6. Das Signal des Referenzschalters an den Eingang „bCalibrationCam“ des Funktionsbausteins anlegen. ð Sie können die Referenzfahrt mit einer positiven Flanke am Eingang „Execute“ starten. Version: 1.2 EL7411...
-
Seite 137: Nullimpuls Von Der C-Spur Des Encoders
Damit der Motor nach dem Herunterfahren vom Referenznocken erst mit dem Nullimpuls stehen bleibt, konfigurieren Sie die Klemme wie folgt: 1. Eine Referenzfahrt mit Referenznocken konfigurieren: Schaltsignal von einem digitalen Eingang der EL7411 [} 131] oder Schaltsignal aus der SPS (PLC Camming) [} 135] 2. - Seite 138 Inbetriebnahme 3. Die Prozessdatenobjekte für die Funktion „Touch Probe“ aktivieren: 0x1607, 0x1A07, 0x1A08 ð Nach jeder Aktivierung eines Prozessdatenobjekts erscheint ein Dialogfenster. 4. Jedes Dialogfenster mit „Ja“ bestätigen. Version: 1.2 EL7411...
-
Seite 139: Inbetriebnahme Mit Status-Wort Und Control-Wort
Für jede Betriebsart ist es notwendig, die Endstufe freizugeben. Dazu müssen über die SPS im Control-Wort die folgenden Werte in der angegeben Reihenfolge eingeben werden (siehe Abb. DS402 State Machine ). Im Status-Wort werden die entsprechenden Statusmeldungen ausgegeben. (Fault reset) (Shutdown) (Switch on) (Enable operation) EL7411 Version: 1.2... - Seite 140 Inbetriebnahme Abb. 96: DS402 State Machine Version: 1.2 EL7411...
- Seite 141 Über die SPS kann in der Variable „Target torque“ ein definiertes Moment eingestellt werden, auf dem die EL7411 regelt und in der Variablen „Commutation angle“ kann der Winkel angegeben werden, der mit dem eingestellten Moment gehalten werden soll. Das Moment wird in 1000stel des Nennstroms angegeben.
-
Seite 142: Inbetriebnahme Mit Drive Motion Control
Mit Drive Motion Control können Sie eine Fahrwegsteuerung ohne die TwinCAT NC realisieren. Die TwinCAT NC erfordert einen EtherCAT-Master, der Distributed Clocks unterstützt. Ein möglicher Anwendungsfall für Drive Motion Control ist also der Betrieb einer EL7411 an einer Steuerung, die Distributed Clocks nicht unterstützt. Z.B. ein Embedded-PC der Serie CX7000. -
Seite 143: Inbetriebnahme Mit Einer 64-Bit-Steuerung
Inbetriebnahme 6.7.3 Inbetriebnahme mit einer 64-Bit-Steuerung Mit den folgenden Schritten konfigurieren Sie TwinCAT für den Betrieb einer EL7411 mit Drive Motion Control. 1. Im CoE-Parameter 0x7010:03 „Modes of operation“ die Betriebsart „Drive Motion Control (DMC)“ einstellen. 2. Das Predefined PDO Assignment „Drive motion control (For TC3 DriveMotionControl Lib)“ aktivieren. - Seite 144 ð Die Bibliothek mit „Qualified access only“ kann im SPS-Code nur noch über den entsprechenden Namespace angesprochen werden, z.B.: Tc3_DriveMotionControl.MC_Stop() Dadurch werden Namenskonflikte vermieden, z.B. beim Aufrufen des Funktionsbausteins MC_Stop, der in beiden Bibliotheken den gleichen Namen hat. 6. In der SPS eine Variable vom Typ „AXIS_REF“ deklarieren. Beispiel: DmcAxis: AXIS_REF; END_VAR Version: 1.2 EL7411...
- Seite 145 Inbetriebnahme 7. In der Menüleiste „Build“ > „Build Solution“ anklicken. ð Das Projekt wird kompiliert. ð Das Prozessabbild der SPS-Task wird erzeugt. EL7411 Version: 1.2...
- Seite 146 Inbetriebnahme 8. Im Solution Explorer die SPS-Variablen mit den Prozessdaten von EL7411 verknüpfen. 9. Im SPS-Code den Funktionsbaustein ReadStatus() zyklisch aufrufen, idealerweise zu Beginn jedes SPS-Zyklus. 6.7.3.1 Parameter CoE-Parameter Die CoE-Parameter zur Konfiguration von Drive Motion Control befinden sich in den folgenden CoE- Objekten: •...
- Seite 147 Das folgende Beispiel zeigt die Umsetzung in einem SPS-Programm: PROGRAM MAIN DmcAxis: AXIS_REF END_VAR // Update the axis structure DmcAxis.ReadStatus(); // Scaling factor without gear ratio, feed constant 360° DmcAxis.Parameter.EncoderScalingFactor := 0.000000083819031715393066; // Velocity scaling with 1000 rpm, feed constant 360° DmcAxis.Parameter.MaxVelocity := 6000; EL7411 Version: 1.2...
-
Seite 148: Inbetriebnahme Mit Einer 32-Bit-Steuerung
Position“ weiterhin in 32 Bit Singleturn und 32 Bit Multiturn angegeben werden, anstatt in 20 Bit Singleturn und 12 Bit Multiturn. Zu beachten ist, dass die EL7411 nur Inkrementalencoder und keine Absolutwertgeber unterstützt. Daher bleiben die Positionsdaten über einen Powercycle hinaus nicht erhalten. Alle nicht positionsbezogenen Prozessdaten bleiben in der Größe unverändert. Die Adressoffsets der einzelnen Prozessdaten sind identisch und an den entsprechenden Stellen sind Füll-Bytes eingefügt. - Seite 149 2. Das Predefined PDO Assignment „Drive motion control (32 Bit)“ aktivieren. ð Die Prozessdaten für die Verwendung von Drive Motion Control sind aktiviert. CoE-Parameter Die CoE-Parameter zur Konfiguration von Drive Motion Control befinden sich in den folgenden CoE- Objekten: • 0x8040 „DMC Settings“ [} 176] • 0x8041 „DMC Features“ [} 177] EL7411 Version: 1.2...
-
Seite 150: State-Machine
Inbetriebnahme 6.7.5 State-Machine Es ist auch möglich, ohne die Funktionsbausteine der Bibliothek „Tc3_DriveMotionControl“ Fahraufträge zu starten. Zugrunde liegt die folgende Statusmaschine: Die Variablen zur Steuerung und Auswertung befinden sich in den Prozessdatenobjekten „DMC Inputs“ und „DMC Outputs“: Version: 1.2 EL7411... -
Seite 151: Unterschiede Zu Tc2_Mc2
6.7.6 Unterschiede zu Tc2_Mc2 Tc2_Mc2 ist die SPS-Bibliothek, die für den Betrieb von EL7411 mit der TwinCAT NC verwendet wird. Die Funktionsbausteine der Bibliothek Tc3_DriveMotionControl haben eine ähnliche Struktur wie die von Tc2_Mc2. Tc3_DriveMotionControl weicht aber in den folgenden Punkten von Tc2_Mc2 ab: •... -
Seite 152: Fehlermeldungen
Invalid value for "Target velocity" 0x8458 Invalid value for "Target position" 0x8459 Emergency stop active 0x845A Target position exceeds Modulofactor 0x845B Drive must be disabled 0x845C No feedback found 0x845D Modulo factor invalid 0x845E Invalid target position window Version: 1.2 EL7411... -
Seite 153: Touch Probe
Prozessdaten [} 157] können die dazu nötigen Eingänge und Ausgänge hinzugefügt werden. Die EL7411 verfügt über 2 digitale Eingänge, die für die Funktion „Touch Probe“ genutzt werden können. Jeder Touch Probe-Eingang kann zu jedem Zeitpunkt nur Flanken einer Richtung erfassen (steigend oder fallend). - Seite 154 Inbetriebnahme Abb. 97: Touch Probe inputs Version: 1.2 EL7411...
- Seite 155 • Um die Touch Probe Funktion generell zu aktivieren, muss „TP1 Enable“ auf true gesetzt werden. • Anschließend muss entschieden werden, ob bei einer positiven Flanke auf dem Eingang 1 die Position gespeichert werden soll („TP1 Enable pos edge“ = true) oder bei einer negativen Flanke („TP1 Enable neg edge“ = true) EL7411 Version: 1.2...
- Seite 156 Dann wird erneut bei der ersten negativen Flanke die Position gespeichert. • Der „TP1 Trigger mode“ hat bei der EL7411 keine Funktion. • Die gespeicherte Position der positiven Flanke kann in den Inputs der Prozessdaten unter „TP1 Pos position“, die der negativen Flanke kann unter „TP1 Neg position“...
-
Seite 157: Prozessdaten
Inbetriebnahme Prozessdaten Sync Manager (SM) Der Umfang der angebotenen Prozessdaten kann über den Reiter „Process Data“ verändert werden: • Sync Manager SM2 „Outputs“ • Sync Manager SM3 „Inputs“ EL7411 Version: 1.2... - Seite 158 DMC__PositioningCon- Index 0x7040:22 [} 187] trol__Emergency stop DMC__Set counter value Index 0x7040:31 [} 187] DMC__Target position Index 0x7040:32 [} 187] DMC__Target velocity Index 0x7040:33 [} 187] DMC__Start type Index 0x7040:34 [} 187] DMC__Target acceleration Index 0x7040:35 [} 187] DMC__Target deceleration Index 0x7040:36 [} 187] Version: 1.2 EL7411...
- Seite 159 Index 0x7040:31 [} 187] DMC__Target position Index 0x7040:32 [} 187] DMC__Target velocity Index 0x7040:33 [} 187] DMC__Start type Index 0x7040:34 [} 187] DMC__Target acceleration Index 0x7040:35 [} 187] DMC__Target deceleration Index 0x7040:36 [} 187] Diese Prozessdatenobjekte sind erst ab Firmware 06 und ESI 0019 verfügbar. EL7411 Version: 1.2...
- Seite 160 DMC__DriveStatus__Ready Index 0x6040:11 [} 183] to enable DMC__DriveStatus__Ready Index 0x6040:12 [} 183] DMC__DriveStatus__War- Index 0x6040:13 [} 183] ning DMC__DriveStatus__Error Index 0x6040:14 [} 183] DMC__DriveStatus__Moving Index 0x6040:15 [} 183] positive DMC__DriveStatus__Moving Index 0x6040:16 [} 183] negative DMC__DriveStatus__Digital Index 0x6040:1C [} 183] input 1 Version: 1.2 EL7411...
- Seite 161 Index 0x6040:15 [} 183] positive DMC__DriveStatus__Moving Index 0x6040:16 [} 183] negative DMC__DriveStatus__Digital Index 0x6040:1C [} 183] input 1 DMC__DriveStatus__Digital Index 0x6040:1D [} 183] input 2 DMC__PositioningSta- Index 0x6040:21 [} 183] tus__Busy DMC__PositioningSta- Index 0x6040:22 [} 183] tus__In-Target DMC__PositioningSta- Index 0x6040:23 [} 183] tus__Warning DMC__PositioningSta- Index 0x6040:24 [} 183] tus__Error EL7411 Version: 1.2...
- Seite 162 DMC__Input cycle counter Index 0x6040:38 [} 183] DMC__Channel id Index 0x6040:39 [} 183] DMC__Latch value Index 0x6040:3A [} 183] DMC__Cyclic info data 1 Index 0x6040:3B [} 183] DMC__Cyclic info data 2 Index 0x6040:3C [} 183] Diese Prozessdatenobjekte sind erst ab Firmware 06 und ESI 0019 verfügbar. Version: 1.2 EL7411...
- Seite 163 0x1602 [} 196] (DRV Target torque) 0x1A01 [} 201] (DRV Statusword) Drive motion control 0x1640 [} 199] (DMC Outputs) 0x1A40 [} 205] (DMC Inputs) (For TC3 DriveMotionControl Lib) Drive motion control 0x1641 [} 200] (DMC Outputs 32 Bit) 0x1A41 [} 208] (DMC Inputs 32 Bit) (32 Bit) EL7411 Version: 1.2...
-
Seite 164: Fehlerdiagnose
Fehlerdiagnose Fehlerdiagnose Diag History In der Diag History werden Status-Meldungen von EtherCAT-Devices angezeigt. Die Status-Meldungen dienen zur Diagnose und Fehlersuche. Die folgende Tabelle zeigt alle möglichen Status-Meldungen von EL7411: Englisch Deutsch 0x1201 Communication re-established Verbindung zur Feldseite wiederhergestellt 0x4101 Terminal-Overtemperature Klemmen-Übertemperatur... - Seite 165 Combination of Mode of Operation and Kombination aus Mode of Operation und Commutation Type is invalid Commutation Type ist nicht zulässig 0x8601 Supply voltage to low Versorgungsspannung zu klein 0x8602 Supply voltage to high Versorgungsspannung zu gross EL7411 Version: 1.2...
-
Seite 166: Coe-Parameter
FB Touch probe UINT8 0x12 (18 Settings 8001:11 Touch probe 1 erlaubte Werte: INT16 0x0001 source Touch probe input 1 Hardware zero impulse 8001:12 Touch probe 2 erlaubte Werte: INT16 0x0001 source Touch probe input 1 Hardware zero impulse Version: 1.2 EL7411... - Seite 167 TTL single ended HTL differential HTL single ended RS422 differential - high impedance input TTL single ended - input filters disabled open collector 8008:13 Encoder Auflösung des Encoders nach 4-fach UINT32 0x0000100 Increments per Auswertung 0 (4096 Revolution EL7411 Version: 1.2...
- Seite 168 60° Schritten. Wird durch die Scan Feedback Funktion ermittelt. Siehe Kapitel Scan Feedback [} 113]. 0° 60° 120° 180° 240° 300° 800A:14 Hall sensor type Aktivieren oder Deaktivieren der Open UINT8 0x01 (1 Collector Hallsensor-Eingänge disabled open collector Version: 1.2 EL7411...
- Seite 169 Klemmenübertemperatur Warnschwelle [0,1 UINT16 0x0320 Temperature warn °C] (800 level 8010:2C Amplifier Klemmenübertemperatur Fehlerschwelle UINT16 0x03E8 Temperature error [0,1 °C] (1000 level 8010:31 Velocity limitation Begrenzung der Drehzahlsollwertvorgabe UINT32 0x000186A [1/min] (100000 (Nur wirksam in CSV und CSP Modus) EL7411 Version: 1.2...
- Seite 170 Klemmeninnentemperatur [0,1 °C] I2T Motor [%] I2T Amplifier [%] Digital inputs Bit0: Digital Input 1 Level Bit1: Digital Input 2 Level Bit2: Fan Status (Nur EL7411) Bit3: unused Bit4: Encoder A Bit5: Encoder B Bit6: Encoder C Bit7: unused Bit8: Hall Sensor U...
- Seite 171 [0,1 °C] I²T Motor [%] I²T Amplifier [%] Digital inputs Bit0: Digital Input 1 Level Bit1: Digital Input 2 Level Bit2: Fan Status (Nur EL7411) Bit3: unused Bit4: Encoder A Bit5: Encoder B Bit6: Encoder C Bit7: unused Bit8: Hall Sensor U...
- Seite 172 DC link voltage (mV) PCB temperature (0.1 °C) I2T Motor I2T Amplifier Digital inputs Bit0: Digital Input 1 Level Bit1: Digital Input 2 Level Bit2: Fan Status (Nur EL7411) Bit3: unused Bit4: Encoder A Bit5: Encoder B Bit6: Encoder C Bit7: unused Bit8: Hall Sensor U Bit9: Hall Sensor V...
- Seite 173 Insgesamt wird die doppelte hier angegebene Zeit benötigt. Benötigte Zeit ist applikationsabhängig. 8010:64 Commutation type Methode zur Ermittlung des UINT8 0x01 (1 Kommutierungswinkels: FOC with incremental encoder Six-Step with hall Six-Step sensorless FOC with incremental encoder and hall EL7411 Version: 1.2...
- Seite 174 0x31 (49 Settings 8011:11 Max current Spitzenstrom des Motors [mA]. UINT32 0x0000177 0 (6000 Begrenzung durch maximalen Ausgabestrom der EL7411. Die Motorstromwerte sind als Scheitelwert anzugeben. 8011:12 Rated current Nennstrom des Motors [mA], entspricht UINT32 0x000003E dem maximalen ausgegebenen 8 (1000 Motordauerstrom.
- Seite 175 Zeit des „Austrudelns“ der Achse angepasst werden. Bei hängenden Achsen sollte dieser Parameter auf eine sehr kurze Zeit eingestellt werden, um ein weites Absacken der Achse/Last zu verhindern. 8012:14 Brake moment of Trägheitsmoment der Motorbremse [g cm²] UINT16 0x0000 inertia (0dez) EL7411 Version: 1.2...
- Seite 176 0x1770 timeout sobald der Sollwertgenerator die (6000 Zielposition erreicht hat. Wird die InTarget- Bedingung (siehe 0x8040:15 und 0x8040:16) nicht innerhalb dieser Zeit erreicht, wird der Fahrauftrag abgebrochen. Der Baustein für den Fahrauftrag liefert einen Fehler. Einheit: ms. Version: 1.2 EL7411...
- Seite 177 Digital input F800:11 Fan behaviour Lüfterverhalten UINT8 0x0D (13 Controlled by fan temperature sensor Always on - low speed Always on - mid speed Always on - full speed Controlled by terminal temperature No fan installed EL7411 Version: 1.2...
-
Seite 178: Konfigurationsdaten Herstellerspezifisch
Datentyp Flags Default (hex) FB00:0 Command Kommandoregister UINT8 0x03 (3 Wird verwendet für die Scan-Funktionen. Siehe Kapitel Scannen der Hardware [} 112]. FB00:01 Request Anforderung OCTET- STRING[2] FB00:02 Status Status UINT8 0x00 (0 FB00:03 Response Antwort OCTET- STRING[6] Version: 1.2 EL7411... -
Seite 179: Eingangsdaten
False: Die Positionsdaten sind gültig 6000:0F Input cycle Wird mit jedem Prozessdaten-Zyklus BIT2 0x00 (0 counter hochgezählt, schaltet auf 0 nach Erreichen des Maximalwertes von 3. 6000:11 Position Position UINT32 0x0000000 0 (0 6000:12 Enc Position UINT32 0x0000000 0 (0 EL7411 Version: 1.2... - Seite 180 UINT32 0x0000000 0 (0 Der angegebene Wert muss mit dem entsprechenden Skalierungsfaktor multipliziert werden. 6001:14 TP2 Neg position Negativer Wert von Touch probe 2. UINT32 0x0000000 0 (0 Der angegebene Wert muss mit dem entsprechenden Skalierungsfaktor multipliziert werden. Version: 1.2 EL7411...
- Seite 181 Torque actual INT16 0x0000 value 6010:12 Info data 1 Synchrone Informationen (Auswahl über INT16 0x0000 Subindex 0x8010:39). 6010:13 Info data 2 Synchrone Informationen (Auswahl über INT16 0x0000 Subindex 0x8010:3A). 6010:14 Info data 3 Synchrone Informationen. INT16 0x0000 EL7411 Version: 1.2...
- Seite 182 6020:07 Encoder C BOOLEAN RO 0x00 (0 6020:09 Hall A BOOLEAN RO 0x00 (0 6020:0A Hall B BOOLEAN RO 0x00 (0 6020:0B Hall C BOOLEAN RO 0x00 (0 6020:0D Level of ENA BOOLEAN RO 0x00 (0 input Version: 1.2 EL7411...
- Seite 183 6040:23 DMC__Positionin Warnung. BOOLEAN RO 0x00 (0 gStatus__Warnin 6040:24 DMC__Positionin Fehler. BOOLEAN RO 0x00 (0 gStatus__Error 6040:25 DMC__Positionin Die Achse ist kalibriert. BOOLEAN RO 0x00 (0 gStatus__Calibrat 6040:26 DMC__Positionin Die Achse beschleunigt. BOOLEAN RO 0x00 (0 gStatus__Acceler EL7411 Version: 1.2...
- Seite 184 Datentyp Flags Default (hex) F600:0 FAN Inputs Lüfter Eingang UINT8 0x01 (1 F600:01 Fan diag/ Diagnoseeingang für den Lüfter. BOOLEAN RO 0x00 (0 Standard input Im Betrieb ohne Lüfter auch als Standard- Digitaleingang nutzbar. (Konfiguriert über F800:05) Version: 1.2 EL7411...
-
Seite 185: Ausgangsdaten
1. Es wird bei jedem Event getriggert. 7001:0B TP2 Trigger mode Ohne Funktion. BIT2 0x00 (0 7001:0D TP2 Enable pos Bei positiver Flanke triggern BOOLEAN RO 0x00 (0 edge 7001:0E TP2 Enable neg Bei negativer Flanke triggern BOOLEAN RO 0x00 (0 edge EL7411 Version: 1.2... - Seite 186 (0x8011:12) angegeben. 7010:0B Torque limitation Grenzwert des Drehmomentes für die UINT16 0x7FFF Drehmoment-Überwachung (Bipolar Limit) (32767 Der Wert wird in 1000stel vom Rated current (0x8011:12) angegeben. 7010:0E Commutation Kommutierungs-Winkel für die Betriebsart UINT16 0x0000 angle CSTCA. Einheit: 360° / 2 Version: 1.2 EL7411...
- Seite 187 • 0x0003: Endlos + • 0x0004: Endlos – • 0x0105: Modulo short • 0x0205: Modulo + • 0x0305: Modulo – • 0x6000: Cali PLC cam • 0x6200: Cali Block • 0x6E00: Cali set • 0x6F00: Cali clear EL7411 Version: 1.2...
- Seite 188 Verzögerung von der Motornenndrehzahl bis zum Stillstand. Index F700 FAN Outputs Index Name Bedeutung Datentyp Flags Default (hex) F700:0 FAN Outputs Lüfter Ausgang UINT8 0x01 (1 F700:01 Fan mode/ Ausgang für den Lüftermodus BOOLEAN RO 0x00 (0 Standard output Version: 1.2 EL7411...
-
Seite 189: Informationsdaten, Diagnosedaten
UINT8 0x00 (0dez) temperature Index A011 DRV Motor Diag data Index Name Bedeutung Datentyp Flags Default (hex) A011:0 DRV Motor Diag Motor Diagnosedaten UINT8 0x11 (17 data A011:11 Motor I2T Motor I²T-Modell-Auslastung [%] UINT8 0x00 (0 temperature EL7411 Version: 1.2... - Seite 190 CoE-Parameter Index FB40 Memory interface Index Name Bedeutung Datentyp Flags Default (hex) FB40:0 Memory interface UINT8 0x03 (3 FB40:01 Address UINT32 0x0000000 0 (0 FB40:02 Length UINT16 0x0000 FB40:03 Data OCTET- STRING[8] Version: 1.2 EL7411...
-
Seite 191: Standardobjekte
Profile. Index 1008 Device name Index Name Bedeutung Datentyp Flags Default 1008:0 Device name Geräte-Name des EtherCAT-Slave STRING EL7411 Index 1009 Hardware version Index Name Bedeutung Datentyp Flags Default 1009:0 Hardware version Hardware-Version des EtherCAT-Slaves STRING Index 100A Software version... - Seite 192 Index 10F0 Backup parameter handling Index Name Bedeutung Datentyp Flags Default 10F0:0 Backup parameter Informationen zum standardisierten Laden UINT8 0x01 (1dez) handling und Speichern der Backup Entries 10F0:01 Checksum Checksumme über alle Backup-Entries des UINT32 0x0000000 EtherCAT-Slaves 0 (0dez) Version: 1.2 EL7411...
- Seite 193 STRING[28 10F3:0D Diagnosis OCTET- Message 008 STRING[28 10F3:0E Diagnosis OCTET- Message 009 STRING[28 10F3:0F Diagnosis OCTET- Message 010 STRING[28 10F3:10 Diagnosis OCTET- Message 011 STRING[28 10F3:11 Diagnosis OCTET- Message 012 STRING[28 10F3:12 Diagnosis OCTET- Message 013 STRING[28 EL7411 Version: 1.2...
- Seite 194 STRING[28 10F3:1F Diagnosis OCTET- Message 026 STRING[28 10F3:20 Diagnosis OCTET- Message 027 STRING[28 10F3:21 Diagnosis OCTET- Message 028 STRING[28 10F3:22 Diagnosis OCTET- Message 029 STRING[28 10F3:23 Diagnosis OCTET- Message 030 STRING[28 10F3:24 Diagnosis OCTET- Message 031 STRING[28 Version: 1.2 EL7411...
- Seite 195 STRING[28 10F3:31 Diagnosis OCTET- Message 044 STRING[28 10F3:32 Diagnosis OCTET- Message 045 STRING[28 10F3:33 Diagnosis OCTET- Message 046 STRING[28 10F3:34 Diagnosis OCTET- Message 047 STRING[28 10F3:35 Diagnosis OCTET- Message 048 STRING[28 10F3:36 Diagnosis OCTET- Message 049 STRING[28 EL7411 Version: 1.2...
- Seite 196 Index 1604 DRV RxPDO-Map Torque limitation Index Name Bedeutung Datentyp Flags Default 1604:0 DRV RxPDO-Map PDO Mapping RxPDO 5 UINT8 0x01 (1dez) Torque limitation 1604:01 SubIndex 001 1. PDO Mapping entry (object 0x7010 (DRV UINT32 0x7010:0B, Outputs), entry 0x0B (Torque limitation)) Version: 1.2 EL7411...
- Seite 197 Touch probe outputs), entry 0x0D (TP2 Enable pos edge)) 1607:0B SubIndex 011 11. PDO Mapping entry (object 0x7001 (FB UINT32 0x7001:0E, Touch probe outputs), entry 0x0E (TP2 Enable neg edge)) 1607:0C SubIndex 012 12. PDO Mapping entry (2 bits align) UINT32 0x0000:00, EL7411 Version: 1.2...
- Seite 198 PDO Mapping RxPDO 9 UINT8 0x02 (2dez) Outputs Device 1608:01 SubIndex 001 1. PDO Mapping entry (object 0xF700 (FAN UINT32 0xF700:01, Outputs), entry 0x01 (Fan mode/Standard output)) 1608:02 SubIndex 002 2. PDO Mapping entry (15 bits align) UINT32 0x0000:00, Version: 1.2 EL7411...
- Seite 199 16. PDO Mapping entry (object 0x7040 UINT32 0x7040:35, (DMC Outputs), entry 0x35 (DMC__Target acceleration)) 1640:11 SubIndex 017 17. PDO Mapping entry (object 0x7040 UINT32 0x7040:36, (DMC Outputs), entry 0x36 (DMC__Target deceleration)) 1640:12 SubIndex 018 18. PDO Mapping entry (80 bits align) UINT32 0x0000:00, EL7411 Version: 1.2...
- Seite 200 15. PDO Mapping entry (32 bits align) UINT32 0x0000:00, 1641:10 SubIndex 016 16. PDO Mapping entry (object 0x7040 UINT32 0x7040:33, (DMC Outputs), entry 0x33 (DMC__Target velocity)) 1641:11 SubIndex 017 17. PDO Mapping entry (object 0x7040 UINT32 0x7040:34, (DMC Outputs), entry 0x34 (DMC__Start type)) Version: 1.2 EL7411...
- Seite 201 Index Name Bedeutung Datentyp Flags Default 1A04:0 DRV TxPDO-Map PDO Mapping TxPDO 5 UINT8 0x01 (1dez) Info data 1 1A04:01 SubIndex 001 1. PDO Mapping entry (object 0x6010 (DRV UINT32 0x6010:12, Inputs), entry 0x12 (Info data 1)) EL7411 Version: 1.2...
- Seite 202 Touch probe inputs), entry 0x0B (TP2 Neg value stored)) 1A07:09 SubIndex 009 9. PDO Mapping entry (4 bits align) UINT32 0x0000:00, 1A07:0A SubIndex 010 10. PDO Mapping entry (object 0x6001 (FB UINT32 0x6001:10, Touch probe inputs), entry 0x10 (TP2 Input)) Version: 1.2 EL7411...
- Seite 203 Index 1A0E FB TxPDO-Map Enc Position Index Name Bedeutung Datentyp Flags Default (hex) 1A0E:0 FB TxPDO-Map PDO Mapping TxPDO 15 UINT8 0x01 (1dez) Enc Position 1A0E:01 SubIndex 001 1. PDO Mapping entry (object 0x6000 (FB UINT32 0x6000:12, Inputs), entry 0x12 (Enc Position)) EL7411 Version: 1.2...
- Seite 204 12. PDO Mapping entry (1 bits align) UINT32 0x0000:00, 1A10:0D SubIndex 013 13. PDO Mapping entry (object 0x6020 (DI UINT32 0x6020:0D, Inputs), entry 0x0D (Level of STO input)) 1A10:0E SubIndex 014 14. PDO Mapping entry (3 bits align) UINT32 0x0000:00, Version: 1.2 EL7411...
- Seite 205 UINT32 0x6040:1D, (object 0x6040 (DMC Inputs), entry 0x1D (DMC__DriveStatus__Digital input 2)) 1A40:10 SubIndex 016 16. PDO Mapping entry (3 bits align) UINT32 0x0000:00, 1A40:11 SubIndex 017 17. PDO Mapping entry (object 0x6040 UINT32 0x6040:21, (DMC Inputs), entry 0x21 (DMC__PositioningStatus__Busy)) EL7411 Version: 1.2...
- Seite 206 (DMC Inputs), entry 0x39 (DMC__Channel id)) 1A40:23 SubIndex 035 35. PDO Mapping entry (object 0x6040 UINT32 0x6040:3A, (DMC Inputs), entry 0x3A (DMC__Latch value)) 1A40:24 SubIndex 036 36. PDO Mapping entry (object 0x6040 UINT32 0x6040:3B, (DMC Inputs), entry 0x3B (DMC__Cyclic info data 1)) Version: 1.2 EL7411...
- Seite 207 CoE-Parameter Index Name Bedeutung Datentyp Flags Default 1A40:25 SubIndex 037 37. PDO Mapping entry (object 0x6040 UINT32 0x6040:3C, (DMC Inputs), entry 0x3C (DMC__Cyclic info data 2)) 1A40:26 SubIndex 038 38. PDO Mapping entry (64 bits align) UINT32 0x0000:00, EL7411 Version: 1.2...
- Seite 208 UINT32 0x6040:1D, (DMC Inputs), entry 0x1D (DMC__DriveStatus__Digital input 2)) 1A41:10 SubIndex 016 16. PDO Mapping entry (3 bits align) UINT32 0x0000:00, 1A41:11 SubIndex 017 17. PDO Mapping entry (object 0x6040 UINT32 0x6040:21, (DMC Inputs), entry 0x21 (DMC__PositioningStatus__Busy)) Version: 1.2 EL7411...
- Seite 209 (DMC Inputs), entry 0x37 (DMC__Error id)) 1A41:24 SubIndex 036 36. PDO Mapping entry (object 0x6040 UINT32 0x6040:38, (DMC Inputs), entry 0x38 (DMC__Input cycle counter)) 1A41:25 SubIndex 037 37. PDO Mapping entry (object 0x6040 UINT32 0x6040:39, (DMC Inputs), entry 0x39 (DMC__Channel id)) EL7411 Version: 1.2...
- Seite 210 RxPDO Mapping Objekts) (0dez) 1C12:07 Subindex 007 7. zugeordnete RxPDO (enthält den Index UINT16 0x0000 des zugehörigen RxPDO Mapping Objekts) (0dez) 1C12:08 Subindex 008 8. zugeordnete RxPDO (enthält den Index UINT16 0x0000 des zugehörigen RxPDO Mapping Objekts) (0dez) Version: 1.2 EL7411...
- Seite 211 TxPDO Mapping Objekts) (0dez) 1C13:0F Subindex 015 15. zugeordnete TxPDO (enthält den Index UINT16 0x0000 des zugehörigen TxPDO Mapping Objekts) (0dez) 1C13:10 Subindex 016 16. zugeordnete TxPDO (enthält den Index UINT16 0x0000 des zugehörigen TxPDO Mapping Objekts) (0dez) EL7411 Version: 1.2...
- Seite 212 Anzahl der ausgefallenen SM-Events im UINT16 0x0000 counter OPERATIONAL (nur im DC Mode) (0dez) 1C32:0C Cycle exceeded Anzahl der Zykluszeitverletzungen im UINT16 0x0000 counter OPERATIONAL (Zyklus wurde nicht (0dez) rechtzeitig fertig bzw. der nächste Zyklus kam zu früh) Version: 1.2 EL7411...
- Seite 213 Anzahl der zu kurzen Abstände zwischen UINT16 0x0000 counter SYNC0 und SYNC1 Event (nur im DC (0dez) Mode) 1C32:20 Sync error Im letzten Zyklus war die Synchronisierung BOOLEAN RO 0x00 (0dez) nicht korrekt (Ausgänge wurden zu spät ausgegeben, nur im DC Mode) EL7411 Version: 1.2...
- Seite 214 0x0000 wie 1C32:11 [} 191] counter (0dez) 1C33:0C Cycle exceeded UINT16 0x0000 wie 1C32:12 [} 191] counter (0dez) 1C33:0D Shift too short UINT16 0x0000 wie 1C32:13 [} 191] counter (0dez) 1C33:20 Sync error BOOLEAN RO 0x00 (0dez) wie 1C32:32 [} 191] Version: 1.2 EL7411...
- Seite 215 Download revision Download Revision UINT8 0x01 (1dez) F081:01 Revision number Revisionsnummer der Klemme UINT32 0x0000000 0 (0dez) Relevant als Startup-Listeneintrag für Kompatibilität Index F083 BTN Index Name Bedeutung Datentyp Flags Default (hex) F083:0 Beckhoff Traceability Number STRING EL7411 Version: 1.2...
-
Seite 216: Anhang
Stand. Überprüfen Sie auf der Beckhoff Webseite, ob eine aktuellere Dokumentation vorliegt. Firmware Update EL/ES/ELM/EM/EPxxxx Dieses Kapitel beschreibt das Geräte-Update für Beckhoff EtherCAT Slaves der Serien EL/ES, ELM, EM, EK und EP. Ein FW-Update sollte nur nach Rücksprache mit dem Beckhoff Support durchgeführt werden. - Seite 217 Anhang HINWEIS Nur TwinCAT 3 Software verwenden! Ein Firmware-Update von Beckhoff IO Geräten ist ausschließlich mit einer TwinCAT3-Installation durchzu- führen. Es empfiehlt sich ein möglichst aktuelles Build, kostenlos zum Download verfügbar auf der Beckhoff-Website https://www.beckhoff.com/de-de/. Zum Firmware‑Update kann TwinCAT im sog. FreeRun‑Modus betrieben werden, eine kostenpflichtige Li- zenz ist dazu nicht nötig.
-
Seite 218: Gerätebeschreibung Esi-File/Xml
Nicht kompatible Kombinationen führen mindestens zu Fehlfunktionen oder sogar zur endgültigen Außerbetriebsetzung des Gerätes. Ein entsprechendes Update sollte nur in Rücksprache mit dem Beckhoff Support ausgeführt werden. Anzeige der Slave-Kennung ESI Der einfachste Weg die Übereinstimmung von konfigurierter und tatsächlicher Gerätebeschreibung festzustellen, ist im TwinCAT-Modus Config/FreeRun das Scannen der EtherCAT-Boxen auszuführen:... - Seite 219 In diesem Beispiel in Abb. Änderungsdialog. wurde eine EL3201-0000-0017 vorgefunden, während eine EL3201-0000-0016 konfiguriert wurde. In diesem Fall bietet es sich an, mit dem Copy Before-Button die Konfiguration anzupassen. Die Checkbox Extended Information muss gesetzt werden, um die Revision angezeigt zu bekommen. EL7411 Version: 1.2...
-
Seite 220: Änderung Erst Nach Neustart Wirksam
Die meisten EtherCAT-Geräte lesen eine geänderte ESI-Beschreibung umgehend bzw. nach dem Aufstarten aus dem INIT ein. Einige Kommunikationseinstellungen wie z. B. Distributed Clocks wer- den jedoch erst bei PowerOn gelesen. Deshalb ist ein kurzes Abschalten des EtherCAT Slave nö- tig, damit die Änderung wirksam wird. Version: 1.2 EL7411... -
Seite 221: Erläuterungen Zur Firmware
• offline: in der EtherCAT Slave Information ESI/XML kann der Default-Inhalt des CoE enthalten sein. Dieses CoE-Verzeichnis kann nur angezeigt werden, wenn es in der ESI (z. B. „Beckhoff EL5xxx.xml“) enthalten ist. Die Umschaltung zwischen beiden Ansichten kann über den Button Advanced vorgenommen wer- den. - Seite 222 Firmware Update. Abb. 106: Firmware Update Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z. B. durch den Beckhoff Support vorliegen. Gültig für TwinCAT 2 und 3 als EtherCAT Master. • TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1ms schalten (default sind im ConfigMode 4 ms).
-
Seite 223: Fpga-Firmware *.Rbf
Der TwinCAT System-Manager zeigt die Version der FPGA-Firmware an. Klicken Sie hierzu auf die Ethernet-Karte Ihres EtherCAT-Stranges (im Beispiel Gerät 2) und wählen Sie den Karteireiter Online. Die Spalte Reg:0002 zeigt die Firmware-Version der einzelnen EtherCAT-Geräte in hexadezimaler und dezimaler Darstellung an. EL7411 Version: 1.2... - Seite 224 Abb. 108: Kontextmenu Eigenschaften (Properties) In dem folgenden Dialog Advanced Settings können Sie festlegen, welche Spalten angezeigt werden sollen. Markieren Sie dort unter Diagnose/Online Anzeige das Kontrollkästchen vor '0002 ETxxxx Build' um die Anzeige der FPGA-Firmware-Version zu aktivieren. Version: 1.2 EL7411...
- Seite 225 Ältere Firmware-Stände können nur vom Hersteller aktualisiert werden! Update eines EtherCAT-Geräts Es ist folgender Ablauf einzuhalten, wenn keine anderen Angaben z. B. durch den Beckhoff Support vorliegen: • TwinCAT System in ConfigMode/FreeRun mit Zykluszeit >= 1 ms schalten (default sind im ConfigMode 4 ms).
- Seite 226 • Wählen Sie im TwinCAT System-Manager die Klemme an, deren FPGA-Firmware Sie aktualisieren möchten (im Beispiel: Klemme 5: EL5001) und klicken Sie auf dem Karteireiter EtherCAT auf die Schaltfläche Weitere Einstellungen: • Im folgenden Dialog Advanced Settings klicken Sie im Menüpunkt ESC-Zugriff/E²PROM/FPGA auf die Schaltfläche Schreibe FPGA: Version: 1.2 EL7411...
-
Seite 227: Gleichzeitiges Update Mehrerer Ethercat-Geräte
Die Firmware von mehreren Geräten kann gleichzeitig aktualisiert werden, ebenso wie die ESI- Beschreibung. Voraussetzung hierfür ist, dass für diese Geräte die gleiche Firmware-Datei/ESI gilt. Abb. 110: Mehrfache Selektion und FW-Update Wählen Sie dazu die betreffenden Slaves aus und führen Sie das Firmware-Update im BOOTSTRAP Modus wie o. a. aus. EL7411 Version: 1.2... -
Seite 228: Wiederherstellen Des Auslieferungszustandes
Abb. 112: Eingabe des Restore-Wertes im Set Value Dialog Alternativer Restore-Wert Bei einigen Klemmen älterer Bauart lassen sich die Backup-Objekte mit einem alternativen Restore- Wert umstellen: Dezimalwert: 1819238756, Hexadezimalwert: 0x6C6F6164. Eine falsche Eingabe des Restore-Wertes zeigt keine Wirkung! Version: 1.2 EL7411... -
Seite 229: Support Und Service
Unterstützung bei allen Fragen zu Beckhoff Produkten und Systemlösungen zur Verfügung stellt. Beckhoff Niederlassungen und Vertretungen Wenden Sie sich bitte an Ihre Beckhoff Niederlassung oder Ihre Vertretung für den lokalen Support und Service zu Beckhoff Produkten! Die Adressen der weltweiten Beckhoff Niederlassungen und Vertretungen entnehmen Sie bitte unseren Internetseiten: https://www.beckhoff.de... -
Seite 231: Mehr Informationen
Mehr Informationen: www.beckhoff.de/el7411/ Beckhoff Automation GmbH & Co. KG Hülshorstweg 20 33415 Verl Deutschland Telefon: +49 5246 9630 info@beckhoff.de www.beckhoff.de...