Inhaltsverzeichnis
Werbung
Adept SmartController
Für SmartController CS, SmartController CX, und sDIO Modul
R
SmartServo
OK
HPE
LAN
SW1
1.1
1.2
SF
ES
HD
1 2 3 4
ON
OFF
1
2
3
XDIO
R
SmartServo
OK
HPE
LAN
1.1
1.2
2.1
SW1
SF
ES
HD
1 2 3 4
ON
OFF
1
2
3
XDIO
Device Net
Eth 10/100
XUSR
IEEE-1394
Device Net
Eth 10/100
2.2
XUSR
XSYS
Betriebsanleitung
RS-232/TERM
XSYS
XFP
CAMERA
RS-232/TERM
BELT ENCODER
RS-232-1
XFP
*S/N 1000-XXXXX*
RS-422/485
XMCP
XDC1 XDC2
24V
5A
- +
- +
*S/N 3562-XXXXX*
RS-422/485
RS-232-2
XDC1 XDC2
XMCP
24V
5A
-+
-+
Werbung
Inhaltsverzeichnis

Inhaltszusammenfassung für Adept SmartController CX
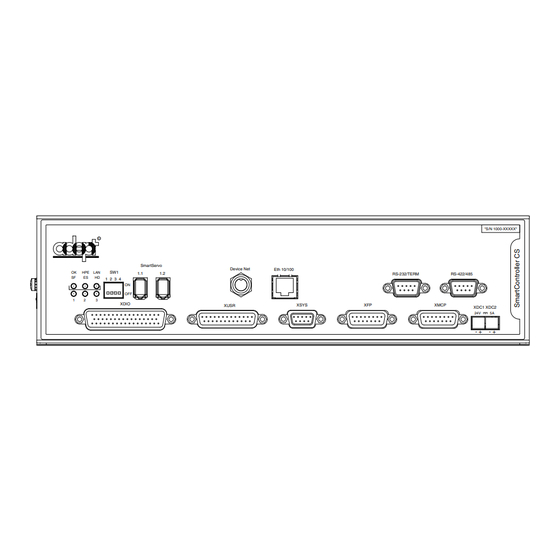
- Seite 1 Adept SmartController Betriebsanleitung Für SmartController CS, SmartController CX, und sDIO Modul *S/N 1000-XXXXX* SmartServo Device Net Eth 10/100 RS-232/TERM RS-422/485 1 2 3 4 XDIO XUSR XSYS XMCP XDC1 XDC2 *S/N 3562-XXXXX* CAMERA RS-232/TERM RS-422/485 SmartServo IEEE-1394 Device Net Eth 10/100...
-
Seite 3: Adept Smartcontroller
Adept SmartController Betriebsanleitung Für SmartController CS, SmartContoller CX, und sDIO Modul *S/N 1000-XXXXX* SmartServo Device Net Eth 10/100 RS-232/TERM RS-422/485 1 2 3 4 XDIO XUSR XSYS XMCP XDC1 XDC2 *S/N 3562-XXXXX* CAMERA RS-232/TERM RS-422/485 SmartServo IEEE-1394 Device Net Eth 10/100... - Seite 4 Das Adept-Logo, CHAD, das CHAD-Logo und Soft Machines sind eingetragene Marken der Adept Technology, Inc. ActiveV, Adept, Adept 1060, Adept 1060+, Adept 1850, Adept 1850 XP, Adept 540, Adept 560, Adept C40, Adept C60, Adept CC, Adept CHADIQ, Adept CHADIQh, Adept CHADIQt, Adept Cobra 550, Adept...
-
Seite 5: Inhaltsverzeichnis
Adept SmartController CX ........ - Seite 6 3.1 Anschlüsse und Anzeigen des SmartController CS ..... . 37 3.2 Anschlüsse und Anzeigen des SmartController CX ..... . 40 3.3 Bedienkonsole .
- Seite 7 Weidmüller ..........67 3.9 Fließband Encoder-Schnittstelle auf SmartController CX ....68 AdeptVision sAVI-Option .
- Seite 8 Anschließen von DeviceNet-Hardware an den Adept DeviceNet Scanner ....... . . 123...
- Seite 9 STEP-Taste ..........152 Adept SmartController Betriebsanleitung, Rev. E...
- Seite 10 Stichwortverzeichnis ......... . . 163 Adept SmartController Betriebsanleitung, Rev. E...
- Seite 11 Abbildung 6-3. Abmessungen der Adept-Bedienkonsole ......93 Abbildung 6-4. Rückansicht der Adept-Bedienkonsole ......94 Abbildung 6-5.
- Seite 12 Abbildung C-18. JOINT-Zustand (Roboter mit sechs Achsen) ..... . 159 Abbildung C-19. FREE-Zustand (SCARA-Roboter mit vier Achsen) ....160 Adept SmartController Betriebsanleitung, Rev. E...
- Seite 13 Stromanschluss am Verteilerkabel ........81 Tabelle 4-3. Pinbelegung am Adept-10-Meter-Verlängerungskabel ....82 Tabelle 4-4.
- Seite 14 Tabelle C-3. Roboter mit mehr als sechs Achsen ....... . . 161 Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 15: Einführung
Einführung Produktbeschreibung Der Adept SmartController ist Teil der Adept-Produktfamilie leistungsstarker Controller für Bewegungssteuerung und Bildverarbeitung. Er ist für den Einsatz mit Adept SmartModules, Robotern der AdeptSix-Serie und dem Adept sMI6-Modul für das Produkt SmartMotion ausgelegt. Alle Adept SmartController bieten bewährte Skalierbarkeit und Unterstützung für IEEE-1394-kompatible E/A- und allgemeine... -
Seite 16: Sdio-Erweiterungsmodul
SmartController-Systems mit sDIO beschrieben. Darüber hinaus gibt es weitere Handbücher zum Programmieren des Systems, erneuten Konfigurieren der installierten Komponenten und Hinzufügen optionaler Komponenten. Die folgenden Handbücher (auf der CD-ROM „Adept Document Library“ im Lieferumfang eines jeden Systems) enthalten Informationen zu erweiterten Konfigurationen und Systemspezifikationen. Tabelle 1-1. Zugehörige Handbücher... -
Seite 17: Adept Document Library
„Document Library“. Mithilfe der Suchfunktion unter „Document Library“ können Sie Informationen zu einem bestimmten Thema finden. Außerdem erhalten Sie über das Dokumentmenü eine Auflistung der verfügbaren Produktdokumentation. Sie können auf die „Adept Document Library“ zugreifen, indem Sie im Browser die folgende URL eingeben: http://www.adept.com/Main/KE/DATA/adept_search.htm Sie können auch auf der Adept-Startseite auf den Link „Document Library“... -
Seite 18: Sicherheit
Geschwindigkeit bewegen und dabei erhebliche Kräfte entwickeln. Wie bei allen Roboter- und Automationssystemen bzw. industriellen Anlagen im Allgemeinen sollte auch beim Betrieb von Adept-Systemen auf größte Sorgfalt seitens des Benutzers und des Bedienpersonals geachtet werden. Diese Betriebsanleitung muss von allen Personen gelesen werden, die Adept-Systeme installieren, betreiben, überwachen oder innerhalb bzw. -
Seite 19: Schutzeinrichtungen Des Systems
Bewegungsautomationssystemen ein fundamentaler Bestandteil der Konzeption der Arbeitszelle, der Installation, der Personalschulung und der Betriebsvorgänge sein. Adept-Systeme verfügen über eine Reihe von Funktionen, die bei der Konzeption von System-Schutzeinrichtungen hilfreich sind. Dazu gehören ein Not-Aus-Schaltkreis und digitale Eingangs- und Ausgangsleitungen. Diese Funktionen werden in Kapitel 3 vorliegenden Handbuchs erläutert. -
Seite 20: Programmsicherheit
-Anweisungen ATTACH und FSET zu beschränken. Nicht zulässige Einsatzbedingungen des Adept SmartController Der Adept SmartController ist einzig und allein für den Einsatz als Baugruppe eines vollständigen industriellen Automationssystems ausgelegt. Der SmartController muss in einem geeigneten Gehäuse installiert werden. Die Installation und Bedienung muss im Einklang mit allen Anweisungen und Warnungen in vorliegendem Handbuch erfolgen. -
Seite 21: Cat-3-Version Des Smartcontroller
Handbuch dargelegten Installationsanweisungen Schritt für Schritt befolgt werden. CAT-3-Version des SmartController Kennzeichnung Der Adept SmartController wurde modifiziert und ist dadurch mit den Sicherheitsbestimmungen der Kategorie 3 konform. Die CAT-3-Version der Modelle CS und CX des SmartController ist aus der Seriennummer an der Vorderseite des Controllers ersichtlich. -
Seite 22: Antriebsleistungsanzeige Am Xdio-Anschluss
Betriebsbezogene Änderungen bei SmartModule-Systemen Bei Verwendung der CAT-3-Version des SmartController in einem Adept SmartModules- oder Adept Servo Kit-System mit PDU-2 tritt beim Betrieb im Vergleich zum ursprünglichen SmartController eine kleine Änderung der Abfolge der Bedienungsvorgänge auf. Die Abfolge lautet hier wie folgt: 1. -
Seite 23: Smartcontroller Installation
Die Ausrüstung muss unter überwachten Temperaturbedingungen (siehe Tabelle 2-1). sowie in der von Adept zur Verfügung gestellten Verpackung versandt und gelagert werden, um Beschädigungen durch Stöße und Erschütterungen zu verhindern. Setzen Sie die in der Verpackung enthaltene Ausrüstung aber trotzdem keinen übermäßigen Erschütterungen aus. -
Seite 24: Erneutes Verpacken Für Standortwechsel
Bewahren Sie alle Verpackungsmaterialien auf. Sie könnten sie zu einem späteren Zeitpunkt für eventuelle Rückerstattungsforderungen oder Umzugszwecke benötigen. Befolgen Sie bei Auspacken des Adept SmartController, des optionalen Adept sDIO-Erweiterungsmoduls, der optionalen Bedienkonsole und des optionalen Manual Control Pendant (MCP) die unten stehenden Anweisungen. Anschließend erhalten Sie in den folgenden Abschnitten die erforderlichen Informationen zur Montage der Geräte. -
Seite 25: Rack-Einbau Des Smartcontroller
Diese Klammern sind nicht im Lieferumfang des SmartController enthalten und müssen separat bestellt werden. 190,0 3X M3 x 6MM R 3,6 2X 40356-00004 BEIDE SEITEN 88,1 44,4 2X 25,0 21,8 19,1 14,2 462,0 TYP. 482,8 Abbildung 2-1. Rack-Einbau des SmartController Adept SmartController Betriebsanleitung, Rev. E... -
Seite 26: Schalttafeleinbau Des Smartcontroller
Einbauklammern an, wie in Abbildung 2-2 dargestellt. Die dazu erforderlichen Schrauben sind im Zubehörsatz enthalten. 200,5 14,0 4X 40356-00000 273,9 27,4 R3.6 TYP. 8X M3 x 6MM 16,1 16,0 44,9 44,9 346,6 359,8 Abbildung 2-2. Schalttafeleinbau des SmartController Adept SmartController Betriebsanleitung, Rev. E... -
Seite 27: Tischeinbau Des Smartcontroller
Die dazu erforderlichen Schrauben sind im Zubehörsatz enthalten. 4X 40356-00001 R 3,6 12,1 29,5 24,1 120,9 24,9 378,6 391,8 4X M3 x 6MM BEIDE SEITEN 16,2 21,6 16,0 120,9 Abbildung 2-3. Tischeinbau des SmartController Adept SmartController Betriebsanleitung, Rev. E... -
Seite 28: Stapeleinbau Von Komponenten
Die CF-Kapazität aller Systeme beträgt derzeit 30 MB und ist werksseitig konfiguriert. Die CF-Karte enthält das Betriebssystem V , die optionale AIM-Software, Anwendungsprogramme, Dateien und Adept-Lizenzen. HINWEIS: Die Kapazität der CF-Karte kann jederzeit ohne Ankündigung durch Adept erhöht werden. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 29: Installieren Der Compactflash-Karte
Installation des Controllers Nicht alle CompactFlash-Typen sind mit dem SmartController kompatibel. Aus diesem Grund dürfen nur als Erstausrüstung von Adept gelieferte oder als Ersatz von Adept bezogene CF-Karten verwendet werden. HINWEIS: Über eine Ethernet-Verbindung und AdeptWindows PC können Sie außerdem mithilfe der mitgelieferten NFS-Software auf die Laufwerke eines PCs zugreifen. -
Seite 30: Anschließen Der Stromversorgung
Kapitel 2 - SmartController Installation HINWEIS: Wenn Sie die CF-Karte ersetzen, müssen Sie die Originalkarte an Adept senden und eine Ersatzkarte anfordern. Drücken Sie im CF-Steckplatz auf die Auswurftaste und entnehmen Sie die Karte. Wenden Sie sich an den Kundendienst von Adept. -
Seite 31: 24-V-Netzverkabelung
Der SmartController ist mit einem Massepunkt ausgestattet (siehe Abbildung 2-7). Adept empfiehlt, den Massepunkt am Controller mit der Schutzerde über ein Erdungskabel zu verbinden und für alle untereinander verbundenen Adept-Komponenten dasselbe elektrische Massepotenzial zu verwenden. Das Erdungskabel muss allen am Einsatzort gültigen Bestimmungen entsprechen. -
Seite 32: Anbringen Der 24-V-Gelichspannungsanschlüsse
6. Sehen Sie sich den Anschluss genau an und überzeugen Sie sich, dass die Klemme am Kabel und nicht an der Isolierung eingerastet ist. 7. Wiederholen Sie diesen Vorgang für den negativen Ausgang der Spannungsquelle an der linken Seite des Anschlusses. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 33: Ieee-1394-Kabelspezifikationen
Controller nicht einschalten. Ein Schaden entsteht nicht. IEEE-1394-Kabelspezifikationen Die zum Verbinden von Adept-Geräten an den SmartController werden von Adept bereitgestellt. Wenn Sie Kabel mit einer anderen Länge als jene im Adept-Angebot benötigen, müssen Sie diese von einem der folgenden Unternehmen beziehen: • Newnex Technology Corp, siehe www.newnex.com... -
Seite 34: Verkabelung Des Systems
Vom Benutzer Bedienkonsole (XFP) bereitgestelltes Massekabel STOP Bedienkonsole Typisches Adept Handbediengerät MCP SmartModule 24 V Gleichspannung von vom Benutzer bereitgestellter Spannungs- versorgung an Controller (XDC1) Desktop- oder Laptop-PC Vom Benutzer bereitgestellte Spannungsversorgung Abbildung 2-9. Systemkabeldiagramm Adept SmartController Betriebsanleitung, Rev. E... - Seite 35 Verkabelung des Systems HINWEIS: Abbildung 2-9 zeigt den Adept SmartController CS in einem SmartModule-System. Die Modelle SmartController CS und CX sind mit anderen Adept-Produkten kompatibel. Dazu gehören folgende: • Roboter AdeptSix 300 • Roboter AdeptSix 300CR • Roboter AdeptSix 600 •...
- Seite 36 Kapitel 2 - SmartController Installation Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 37: Betrieb Des Smartcontroller
Norm. Zur Anpassung an die speziellen Bedürfnisse vor Ort muss der Benutzer die entsprechenden Stecker oder Buchsen mit der korrekten Pin-Zahl bereitstellen oder optionale Adept-Kabel verwenden. HINWEIS: Der SmartController CX verfügt zusätzlich zu den in diesem Abschnitt erläuterten Anschlüsse und Anzeigen des SmartController CS über weitere, die in Abschnitt 3.2 auf Seite 40... -
Seite 38: Tabelle 3-2. Led-Status-Anzeigen
4. SmartServo 1.1 und 1.2 Über diese Anschlüsse können Sie SmartServo-kompatible Produkte an den Controller anschließen. Hierzu gehören SmartModules, Servo Kits, AdeptSix-Roboter, Adept Cobra s600- oder s800-Roboter, sMI6, sDIO und FireBlox-Verstärker. Die Anschlüsse 1.1 und 1.2 sind untereinander austauschbar. (Hinweis: bei früheren SmartController CS-Modellen waren diese Anschlüsse mit „IEEE-1394“... -
Seite 39: Abschnitt 3.8 Auf Seite
DeviceNet ist ein Feldbus für Industriegeräte. Dieser Standard unterstützt eine Reihe von Produkten, einschließlich Sensoren, digitaler und analoger Eingänge/Ausgänge, RS-232 und PLCs. Adept unterstützt digitale E/A-Geräte direkt und qualifiziert derzeit DeviceNet- Produkte von Wago und Beckhoff. Weitere Arten von DeviceNet-Produkten, wie beispielsweise Tastaturen und Displays, können mithilfe der V... -
Seite 40: Anschlüsse Und Anzeigen Des Smartcontroller Cx
Dieser Anschluss ist für die Verbindung mit dem Handbediengerät (Manual Control Pendant - MCP) vorgesehen. Mit dem SmartController können das MCP-III und das MCP-4 verwendet werden. Andere Adept-Handgeräte können nicht verwendet werden, da sie nicht über zwei Not-Aus-Kanäle verfügen. Das MCP-4 (Teilenummer 90332-12506) erfordert ein spezielles, ca. 15 cm langes MCP-4-Adapterkabel (10356-10400) zwischen dem Rundstecker (Circular Plastic Connector - CPC) des MCP und dem D-Sub-Anschluss (15 Pins) des SmartController. -
Seite 41: Bedienkonsole
Windows-basierten PC verbinden. So können Sie eine Verbindung mit der ActiveVR Interface-Software von Adept herstellen, die in V 16.0 verfügbar ist. Verwenden Sie die Anschlüsse 2.1 und 2.2 nicht zum Anschließen von Adept Smart Servo-kompatiblen Produkten oder von nicht von Adept freigegebenen Peripheriegeräten wie z. B. Kameras, Festplatten oder Druckern. - Seite 42 Sie kann auch der Minimierung von Abnutzung bei hochuntersetzten, hochträgen Mechanis- men dienen, während gleichzeitig die Sicherheitsrichtlinien aller Normen eingehalten werden. HINWEIS: Weitere Anweisungen zum Konfigurieren der Not-Aus-Verzögerung finden Sie im Handbuch Instructions for Adept Utility Programs im Abschnitt zu SPEC.V2. Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 43: Konfigurieren Des Controllers
CompactFlash-Steckplatz. Dies ermöglicht das softwareseitige Einstellen aller Konfigurationsoptionen mithilfe des Dienstprogramms CONFIG_C, ohne dass die tatsächlichen DIP-Schalter geändert werden müssen. Das Programm CONFIG_C wird in Instructions for Adept Utility Programs detailliert erläutert. Einstellungen der DIP-Schalter Die folgende Tabelle zeigt die möglichen Einstellungen für die DIP-Schalter unter SW1 auf dem SmartController. -
Seite 44: Adeptwindows - Grafische Bedienungsoberfläche Für Pc
Benutzerschnittstelle über Ethernet AdeptWindows (Standard-IP-Adresse verwenden) Betrieb nach CompactFlash- und NVRAM-Einstellungen HINWEIS: Die Schalter unter SW1 werden von Adept auf die in Zeile 5 Tabelle 3-3 gezeigte Standardkonfiguration (OFF-OFF-OFF-OFF) eingestellt, d. h. die Verwendung der CompactFlash- und NVRAM- Einstellungen. Adept empfiehlt, diese Konfiguration der SW1-DIP- Schalter für den Standardbetrieb des SmartController nicht zu ändern. -
Seite 45: Ascii-Terminal
„RS-232/Term“ und „RS-422/485“ beschriftet sind. Die Position der Anschlüsse wird in Abbildung 3-1 auf Seite 37 gezeigt. Der SmartController CX verfügt über zwei weitere, mit „RS-232-1“ und „RS-232-2“ beschriftete serielle Anschlüsse. Die Position dieser Anschlüsse sehen Sie in Abbildung 3-2 auf Seite RS-232-Anschlüsse... -
Seite 46: Rs-422/485-Anschluss
Anschluss an ein einziges anderes Gerät. Dieser Anschluss kann auch für mehrere Geräte (Multidrop, RS-485) konfiguriert werden. Die Konfiguration des RS-422/485-Anschlusses können Sie das Dienstprogramm CONFIG_C oder die V -Programmanweisung FSET verwenden. Tabelle 3-5 zeigt die -Belegung bei Verwendung der V -Anweisung ATTACH oder FSET. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 47: Installieren Der Bedienungsoberfläche
Hierbei handelt es sich um eine Sammlung von Anwendungsprogrammen, die neue Funktionen für den Adept SmartController und eine Bedienungsoberfläche für den PC bieten. Eine dieser neuen Funktionen ist der Betrieb des Adept SmartController über eine grafische Bedienungsoberfläche bei Verwendung einer Ethernet-Verbindung. -
Seite 48: Textoberfläche Bei Verwendung Eines Pc Mit Hyperterminal-Software
Kapitel 3 - Betrieb des SmartController HINWEIS: Verbinden Sie die erforderlichen Ethernet-Kabel von PC und Adept SmartController, bevor Sie den PC und den Controller einschalten. Weitere Informationen hierzu finden Sie in Abschnitt 2.2 auf Seite 34. HINWEIS: Nach Installation der AdeptWindows-Software finden Sie in der Online-Hilfe von AdeptWindows weitere Informationen zum Einrichten der Bedienungsoberfläche. -
Seite 49: Textoberfläche Bei Verwendung Eines Terminals
(Wyse-Teilenummer 900127-02 oder 900128-02). Hinweis: Das WY-60 ist auch mit ASCII- und erweiterten Tastaturen nach IBM verfügbar. Diese Modelle sind nicht kompatibel zu Adept. Stellen Sie sicher, dass Sie die korrekte Tastatur bestellen. Das WY-60 ist in einer 220-V- und einer 110-V-Ausführung erhältlich. -
Seite 50: Verbinden Kundenspezifischer Ausrüstung Für Sicherheit Und Spannungsversorgung
„WY-75“ nicht verfügbar, verwenden Sie die Option „VT102“ oder „VT100“ (nicht alle Funktionstasten verfügbar). 5. Setzen Sie die Baudrate des Terminals auf 9600, den Standardwert für das Adept-System. Informationen zum Ändern der Baudrate finden Sie in der Hilfe zu CONFIG_C unter Instructions for Adept Utility Programs. -
Seite 51: Tabelle 3-8. Kontakte Des Xfp-Anschlusses
Kommentare kurzge- schlossen Kanal 2 von stummgeschalteter Schließende Kontakte 6,19 Schutztür (entspricht Pins 5 und 18) Spannungsfreie Kontakte (von Adept bereitgestellt) Kanal 1 von Not-Aus-Anzeige Kontakte sind geschlossen, wenn Bedienkonsole, MCP 7,20 und Kunden-Not-Aus nicht ausgelöst sind. Kanal 2 von Not-Aus-Anzeige... -
Seite 52: Tabelle 3-9. Mcp-Verbindungen Des Xmcp-Anschlusses
7,15 (5 V, 20 mA) Keine Verbindung Pin 1 Pin 8 Pin 15 Pin 9 Eine schematische Darstellung der Adept-Bedienkonsole sehen Sie in Abbildung 3-6 auf Seite Tabelle 3-9. MCP-Verbindungen des XMCP-Anschlusses XMCP-Pin MCP-Pin Beschreibung (D-Sub, 15 Pins) (CPC, 16 Pins) - Seite 53 Verbinden kundenspezifischer Ausrüstung für Sicherheit und Spannungsversorgung Tabelle 3-9. MCP-Verbindungen des XMCP-Anschlusses XMCP-Pin MCP-Pin Beschreibung (D-Sub, 15 Pins) (CPC, 16 Pins) Schirmung Schirmung 24 V (keine Verwendung bei MCP III oder MCP 4) Keine Verbindung Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 54: Abbildung 3-3. Bedienkonsole
Kapitel 3 - Betrieb des SmartController Abbildung 3-4 zeigt ein Not-Aus-Diagramm für die CAT-3-Version des Adept SmartController. In Abschnitt 1.6 auf Seite 21 finden Sie eine Beschreibung der Funktionen dieser Version des Controllers. Not-Aus, Antriebsleistung ein/aus und Manuell/Auto für CAT-3-Version des SmartController... -
Seite 55: Abbildung 3-5. Not-Aus-Schaltkreis (Nicht Cat-3-Version) Auf Xusr- Und
XSYS-Signals werden bei Bedarf an PDU gesendet (Keine Benutzerverbindung) Hinweis 1: Bei Verwendung von MCP-3 müssen Sie einen Adapterstecker für den XMCP-Anschluss verwenden, um den Schalter für Kanal 2 zu schließen. Abbildung 3-5. Not-Aus-Schaltkreis (nicht CAT-3-Version) auf XUSR- und XFP-Anschlüssen Adept SmartController Betriebsanleitung, Rev. E... -
Seite 56: Not-Aus-Schaltkreise
Wenn die Pins eines Kanals geschlossen, die des anderen jedoch geöffnet sind, wird zwar ein Not-Aus ausgelöst, der SmartController wird jedoch nicht ordnungsgemäß funktionieren. Ein ordnungsgemäßer Betrieb ist auch dann nicht möglich, wenn die Pins der beiden Kanäle untereinander kurzgeschlossen sind. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 57: Not-Aus-Anzeige (Benutzer) - Externe Erfassung Des Not-Aus
Produktionsbetrieb heruntergefahren werden muss, Sie die Tür im Handbetrieb jedoch öffnen müssen. Im stummgeschalteten Modus kann die Tür offen gelassen werden, sodass das Personal in der Roboterzelle arbeiten können. Die Sicherheit ist hierbei durch die Geschwindigkeitsbeschränkung gewährleistet. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 58: Externer Handbetrieb
Abbildung 3-6 auf Seite 56. In diesem Fall sollte ein Kontaktpaar mit den Kontakten für den Betriebsmodus der Adept-Bedienkonsole in Reihe geschaltet werden. So müssen die Kontakte der Adept-Bedienkonsole und der vom Benutzer bereitgestellten Geräte geschlossen werden, um den Automatikbetrieb aktivieren zu können. -
Seite 59: Externe Antriebsleistungsanzeige
Verlängerungskabels. Wenn der Benutzer die Antriebsleistung jedoch von einem anderen Steuergerät oder von einer anderen Position als der Adept-Bedienkonsole steuern möchte, ist ein spezielles Verteilerkabel oder ein vollständiges Ersetzen der Adept-Bedienkonsole erforderlich. Detaillierte Informationen zur Verdrahtung der Bedienkonsole entnehmen Sie der... -
Seite 60: Lämpchen Für Antriebsleistung
• Drahtstärke: größer als 0,15 mm • Anschlüsse: Standard-D-Sub-Stecker und -Buchsen (15 Pins) • Maximale Kabellänge: 10 m VORSICHT: Das mit dem MCP verbundene Kabel darf nicht modifiziert werden. Dies könnte zu unvorhersehbarem Verhalten des Robotersystems führen. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 61: Verbinden Kundenspezifischer Digitaler E/A-Geräte
0 bis 3 V Gleichspannung Spannungsbereich eingeschaltet 10 bis 24 V Gleichspannung Typische Schwellenspannung = 8 V Gleichspannung Betriebsstrombereich 0 bis 6 mA Strombereich ausgeschaltet 0 bis 0,5 mA Strombereich eingeschaltet 2 bis 6 mA Typischer Schwellenstrom 2,5 mA Adept SmartController Betriebsanleitung, Rev. E... - Seite 62 In der folgenden Abbildung zeigt Beispiel 1 Eingänge (1001 bis 1004) mit einer negativen gemeinsamen Leitung und Beispiel 2 Eingänge (1005 bis 1008) mit einer positiven gemeinsamen Leitung. Beispiel 3 stellt Eingänge (1009 bis 1012) mit einer unabhängigen Stromversorgung (keine gemeinsame Leitung) dar. Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 63: React-Eingangssignale 1001 Bis 1012
Verbinden kundenspezifischer digitaler E/A-Geräte HINWEIS: Hierbei handelt es sich lediglich um Beispiele. Sie können beide Methoden auf beliebigen Kanälen verwenden. Von Adept gelieferte Ausrüstung Kundenspezifische Ausrüstung (typische Beispiele) (gleichwertiger Schaltkreis) Signal 1001 Beispiel 1 – Signal 1002 – Kunden-Spannungs- –... -
Seite 64: Ausgangssignale
Ausgängen des XDIO-Anschlusses. Bei diesen Beispielen werden negative und positive gemeinsame Leitungen unter Verwendung der internen 24-V- und Masseverbindungen genutzt. Beispiel 1: Ausgänge 0001 bis 0004 mit positiver gemeinsamer Leitung. Beispiel 2: Ausgänge 0005 bis 0008 mit negativer gemeinsamer Leitung. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 65: Abbildung 3-8. Verdrahtung Der Digitalen Ausgänge Für Xdio-Anschluss
Signal 0003 – Belastung Signal 0004 – Belastung Signal 0005 Beispiel 2 – Stromsenke Signal 0006 – Load Signal 0007 – Load Signal 0008 – +24V (1A) Masse Abbildung 3-8. Verdrahtung der digitalen Ausgänge für XDIO-Anschluss Adept SmartController Betriebsanleitung, Rev. E... -
Seite 66: Tabelle 3-12. Pinbelegung Des Xdio-Anschlusses Für Digitale Eingänge/Ausgänge
24 V 24 V Eingang Rückleiter Rückleiter Rückleiter 1012 1012 24 V 24 V Ausgang Ausgang 0001+ 0001– Pin 17 Pin 1 XDIO Pin 33 Pin 18 Pin 50 Pin 34 Gesamtstrom maximal 1 A Adept SmartController Betriebsanleitung, Rev. E... -
Seite 67: Bestellinformationen Zum Digitalen E/A-Anschlüssen Von Drittherstellern
FLKM-D 50 SUB/B „DIN rail mount interface block screw terminal to 50-pin D connector (female)“. (Alternative: FLK-D 50 SUB/B) Weidmüller AD911886 - RD 50 ASJS –„D-Sub to wire transition module, 50-pin female D-Sub with jackscrews“. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 68: Fließband Encoder-Schnittstelle Auf Smartcontroller Cx
Kapitel 3 - Betrieb des SmartController Fließband Encoder-Schnittstelle auf SmartController CX Für die Verwendung mit Fließbandverfolgung unterstützt der SmartController CX zwei unabhängige, über einen D-Sub-Stecker (15 Pin) angeschlossene, externe Fließband-Encoder. Die Pinbelegung des Fließband-Encoder-Anschlusses werden in Tabelle 3-13 dargestellt. Abbildung 3-9 auf Seite 69 stellt einen typischen Eingangsstromkreis dar. -
Seite 69: Abbildung 3-9. Typischer Schaltkreis Des Fließband-Encoder-Anschlusses
Fließband Encoder-Schnittstelle auf SmartController CX Fließband-Encoder-Anschluss von SmartController Encoder-Kanal 1 2200 Typischer 26LS33 Eingangsstromkreis (identisch für A, B Encoder und I - beide Encoder) A – 2200 B – – I – Encoder-Ausgangsleistung: 5 V bei 800 mA max. (1-A-Sicherung) Enc.-Spann. - Seite 70 Kapitel 3 - Betrieb des SmartController Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 71: Adeptvision Savi-Option
Motion-Control-System hinzugefügt werden kann. Die AdeptVision sAVI-Karte ist eine Zusammensetzung zweier Karten im PMC Standard. Diese sAVI-Karte wird im Inneren des Adept SmartController CX installiert und dient sowohl als Frame Grabber als auch zur Bildverarbeitung für AdeptVision sAVI. Die Karte verwendet einen digitalen Signalprozessor (DSP) und bietet vier Bildpuffer mit 640 x 480 Pixeln. -
Seite 72: Systemanforderungen Und Einschränkungen Für Die Savi-Karte
Einschränkungen für AdeptVision sAVI Inspection System Das eigenständige industrielle Bildverarbeitungssystem AdeptVision sAVI Inspection wird im SmartController CX installiert und beinhaltet die Anwendung AIM VisionWare für die Programmierung und den Betrieb des Systems. Die folgenden roboterbezogenen Anschlüsse des SmartController CX sind in einem sAVI Inspection-System nicht funkti- onsfähig: XUSR, XSYS, XFP und XMCP. -
Seite 73: Unterstützte Kameras
Diese Kamera wird nur im Non-Interlaced-, Vollbild- und Shutter-Modus unterstützt. Der synchrone Strobe-Modus wird unterstützt, der asynchrone Reset-Strobe-Modus allerdings nicht. Herunterladen von Kamerainformationen Benutzerangepasste Kameramodule und Informationen zu den von sAVI unterstützten Kameras erhalten Sie auf der Adept-Website unter der folgenden Adresse: http://www.adept.com/main/KE/ServicesDB/search.asp Adept SmartController Betriebsanleitung, Rev. E... -
Seite 74: Kamerakabel
Die Verteilerkabel werden nicht direkt an die Kamera angeschlossen. Für den Anschluss an die Kamera muss ein Verlängerungskabel verwendet werden. Zu diesem Zweck erhalten Sie bei Adept ein 10-Meter-Kabel. Diese Kabel können auch bei Intercon 1 erworben werden. Die aktuellen Intercon 1-Teilenummern erhalten Sie beim Adept Applications Support. -
Seite 75: Verteilerkabel Mit Vier Anschlüssen Für Rs-170-Kameras
Abbildung 4-1. Verteilerkabel mit zwei Anschlüssen für RS-170-Kameras Verteilerkabel mit vier Anschlüssen für RS-170-Kameras Dieses Kabel, erhältlich bei Adept (TN 10332-01375), ist an einem Ende mit einem D-Sub-Anschluss (44 Pins) ausgestattet und teilt sich am anderen Ende in vier 12-Pin-Kameranschlüsse (Typ Hirose) und einen D-Sub-Anschluss (9 Pins). -
Seite 76: Verlängerungskabel Für Kamera (10 M)
Hirose-Buchse ausgestattet. Sie dienen als Verbindung zwischen den Verteilerkabeln und den Anschlüssen an den Kameras. Für jede Kamera ist ein solches (oder gleichwertiges) Kabel erforderlich. Informationen zur Pinbelegung erhalten Sie in Tabelle 4-3 auf Seite Adept SmartController Betriebsanleitung, Rev. E... -
Seite 77: Anbringen Der Kamerakabel
Anbringen der Kamerakabel Anbringen der Kamerakabel Abbildung 4-3 auf Seite 78 zeigt die Installation eines typischen RS-170-Verteilerkabels und der damit verbundenen Hardware in einem SmartController CX-System. Informationen zur Montage von Kameras und Stroboskopen im System finden Sie in AdeptVision User’s Guide. -
Seite 78: Abbildung 4-3. Darstellung Der Kamerakabelinstallation (Rs-170)
(10 m, eines je Kamera) Bis zu zwei optionale Stroboskope Vom Benutzer bereitgestellter D-Sub-Stecker (9 Pins) Vom Benutzer bereitgestellte 12-V-Gleich- spannungs- Bis zu vier Kameras versorung für können installiert werden. Kameras Abbildung 4-3. Darstellung der Kamerakabelinstallation (RS-170) Adept SmartController Betriebsanleitung, Rev. E... -
Seite 79: Pins Und Signale Bei Kamerakabeln
Signale zwischen dem 44-Pin-Anschluss und den Stroboskop- bzw. Stromanschlüssen beim Verteilerkabel mit vier Kameraanschlüssen. Die Tabelle ist anhand von Kameranummern gegliedert. • Tabelle 4-6 enthält ähnliche Informationen wie Tabelle 4-5, ist aber dem 44-Pin-Anschluss nach geordnet. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 80: Tabelle 4-1. Pinbelegung Für Kamera-Verteilerkabel (Rs-170)
Dieser Anschluss wird üblicherweise über ein 10-Meter-Verlängerungskabel mit der Kamera verbunden. In speziellen Anwendungen kann der Anschluss mit dem Hirose-Stecker HR10A-10P-12P (nicht im Lieferumfang enthalten) oder Ähnlichem verbunden werden. Informationen zur Pinbelegung finden Sie in Abbildung 4-4. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 81: Tabelle 4-2. Pinbelegung Für Den Standardmäßigen Stoboskop- Bzw
Tabelle 4-2. Pinbelegung für den standardmäßigen Stoboskop- bzw. Stromanschluss am Verteilerkabel Funktion Hinweise +12 V Gleichspannung an Kameras (nicht im Lieferumfang) Spannungsrückleiter (Masse, nicht im Lieferumfang) Stroboskop 1 Stroboskoprückleiter (Masse) Stroboskop 2 Reserviert Reserviert Reserviert Schirmung D-Sub-Buchse (9 Pins) Adept SmartController Betriebsanleitung, Rev. E... -
Seite 82: Abbildung 4-4. Pinbelegung Am Kamerakabelstecker (12-Pin-Hirose)
Kapitel 4 - AdeptVision sAVI-Option Tabelle 4-3. Pinbelegung am Adept-10-Meter-Verlängerungskabel Pin-Nr. an Pin-Nr. an Drahtfarbe Kameraseite Steckerseite Funktion Hinweise (typisch) (Buchse) Spannungsrückleiter Grau +12 V Gleichspannung an Kamera Gelb Schirmung (Video) Rot - Schirmung Video von Kamera Rot - Signal... -
Seite 83: Funktion
Schirmung (VD) Beachten Sie, dass dieses Kabel 12 V Gleichspannung (max. 1 A mit Sicherung) vom Adept-Controller zu den Kameras führt. Die Sicherung kann nicht vom Benutzer ersetzt werden. Wenn der von den zwei Kameras benötigte Gesamtstrom 1 A überschreitet, darf dieses Kabel nicht verwendet werden. -
Seite 84: Tabelle 4-5. Pinbelegung Am Verteilerkabel Mit Vier Kameraanschlüssen
+12 V Gleichspannung Schirmung (Video) KAM 3 Video KAM 3 KAM 3 Schirmung (HD) KAM 3 HD (horizontale Synchronimpulse) KAM 3 VD (vertikale Synchronimpulse) KAM 3 nicht angeschlossen KAM 3 nicht angeschlossen KAM 3 nicht angeschlossen Adept SmartController Betriebsanleitung, Rev. E... - Seite 85 Stroboskop 1 Strob/Strom Stroboskoprückleiter Strob/Strom Stroboskop 2 Strob/Strom Reserviert Strob/Strom Reserviert Strob/Strom Reserviert Strob/Strom Schirmung Beachten Sie, dass dieses Kabel (nicht im Lieferumfang enthalten) 12 V Gleichspannung vom Stroboskop- bzw. Stromanschluss an die Kameras führt. Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 86: Tabelle 4-6. Pinbelegung Am Verteilerkabel Mit Vier Kameraanschlüssen
KAM 4 VD (vertikale Synchronimpulse) HD (horizontale KAM 3 Synchronimpulse) Schirmung (HD) KAM 3 KAM 3 Schirmung (VD) HD (horizontale KAM 2 Synchronimpulse) KAM 2 Schirmung (HD) Schirmung (Takt) KAM 2 Schirmung (VD) KAM 2 Adept SmartController Betriebsanleitung, Rev. E... - Seite 87 Reserviert KAM 1 Video KAM 2 Schirmung (Video) KAM 3 Video Beachten Sie, dass dieses Kabel (nicht im Lieferumfang enthalten) 12 V Gleichspannung vom Stroboskop- bzw. Stromanschluss, und nicht vom Adept-Controller, an die Kameras führt. Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 88: Savi-Kartenspezifikationen
Leistung (W) +3,3 V +5 V +12 V 0,08* 1,0* 0,11* 1,0* -12 V 0,06 0,09 *Dabei wird davon ausgegangen, dass von den +12-V-Pins des DB44-Anschlusses kein Strom bezogen wird. Die Angaben können geändert werden. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 89: Wartung Des Smartcontroller
Ein durchgebranntes Lämpchen muss ersetzt werden, bevor die Antriebsleistung wieder eingeschaltet werden kann. Nachfolgend wird beschrieben, wie Sie das Lämpchen in der Antriebsleistungsanzeige ersetzen. Die Lampe ist bei Adept unter der Teilenummer 27400-29006 erhältlich. 1. Schalten Sie die gesamte Stromzufuhr des SmartController aus. -
Seite 90: Abbildung 5-1. Anordnung Der Lampenhalterungskontakte
Rückseite der vorderen Abdeckung Leitung zwischen LED und Gehäuse der Bedienkonsole. Entfernen Sie die vordere Verkleidung vorsichtig, um Halterung des Lämpchens eine Beschädigung der für die Antriebsleistungsanzeige Leitungen zu verhindern. Abbildung 5-1. Anordnung der Lampenhalterungskontakte Adept SmartController Betriebsanleitung, Rev. E... -
Seite 91: Technische Daten
Die Abmessungen der Modelle CS und CX sind identisch. 328,9 *S/N 3561-XXXXX* IEEE-1394 Device Net Eth 10/100 RS-232/TERM RS-422/485 1 2 3 4 86,10 XDIO XUSR XSYS XMCP XDC1 XDC2 12,1 186,5 189,1 Abbildung 6-1. Abmessungen des SmartController Adept SmartController Betriebsanleitung, Rev. E... -
Seite 92: Abmessungen Des Sdio
Kapitel 6 - Technische Daten Abmessungen des sDIO In diesem Abschnitt finden Sie Angaben zu den Abmessungen des sDIO-Moduls. 328,9 IEEE-1394 *S/N 3563-XXXXX* XDC1 XDC2 LINK 41,6 0.5A 186,5 Massepunkt Abbildung 6-2. Abmessungen des sDIO Adept SmartController Betriebsanleitung, Rev. E... -
Seite 93: Abmessungen Der Adept-Bedienkonsole
Abmessungen der Adept-Bedienkonsole Abmessungen der Adept-Bedienkonsole 152,4 38,7 STOP 55,9 88,9 16,5 13,1 129,5 Abbildung 6-3. Abmessungen der Adept-Bedienkonsole Adept SmartController Betriebsanleitung, Rev. E... -
Seite 94: Abbildung 6-4. Rückansicht Der Adept-Bedienkonsole
Kapitel 6 - Technische Daten 4X M4 x 18MM 76,2 139,7 Abbildung 6-4. Rückansicht der Adept-Bedienkonsole Adept SmartController Betriebsanleitung, Rev. E... -
Seite 95: Abmessungen Des Adept Mcp
HALT 279,40 mm COMP HOLD SLOW SLOW DONE 103,12 mm Ð J 7 J Ð ¥ STEP 52,07 mm 114,30 mm 11,66 mm Not-Aus-Schalter 5,84 mm Schalter gedrückt 48,26 mm Abbildung 6-5. Abmessungen des MCP Adept SmartController Betriebsanleitung, Rev. E... -
Seite 96: Abbildung 6-6. Abmessungen Der Mcp-Halterung
10,2 mm 28,7 mm (4 X) (2 X) 271,5 mm 203,2 mm (2 X) 4,8 mm (4 X) 9,7 mm (4 X) ø 9.7 mm (4 X) 201 mm 221 mm Abbildung 6-6. Abmessungen der MCP-Halterung Adept SmartController Betriebsanleitung, Rev. E... -
Seite 97: Sdio-Modul
übereinander montiert werden. Informationen zur Montage des sDIO finden Sie weiter unten. HINWEIS: Zur Gewährleistung der Konformität mit der Europäischen Norm EN 60204 muss der Einbau des Controllers und sämtlicher Anschlüsse in Europa gemäß dem darin festgelegten Standard erfolgen. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 98: Rack-Einbau Des Sdio
Diese Klammern sind nicht im Lieferumfang des sDIO enthalten und müssen separat bestellt werden. 190.0 2X M3 x 6MM 2X 40356-00003 BEIDE SEITEN R 3,6 16,0 43,9 31,8 14,0 14,2 462,0 482,8 TYP. Abbildung A-2. Rack-Einbau des sDio Adept SmartController Betriebsanleitung, Rev. E... -
Seite 99: Schalttafeleinbau Des Sdio
Einbauklammern an. Die dazu erforderlichen Schrauben sind im Zubehörsatz enthalten (siehe Abbildung A-3). 186,5 14,0 2X 40356-00000 273,9 27,6 4X M3 x 6MM 18,0 10,0 R 3,6 16,0 346,4 359,6 Abbildung A-3. Schalttafeleinbau des sDio Adept SmartController Betriebsanleitung, Rev. E... -
Seite 100: Tischeinbau Des Sdio
1. Nehmen Sie das sDIO-Modul aus der Verpackung und bringen Sie es in der Nähe des Roboters an oder bereiten Sie es, wie unter „Einbau des sDIO“ auf Seite 97 beschrieben, für die Montage vor. 2. Vergewissern Sie sich, dass die 24-V-Gleichspannungsversorgung des SmartController unterbrochen ist. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 101: A.3 Konfigurieren Eines Einzelnen Sdio
RIO-Gerät für denselben Blocktyp verwendet wird. Standard-E/A-Konfiguration im sDIO Für ein einzelnes sDIO-Module kann die Standard-E/A-Signalkonfiguration ohne zusätzliche Konfiguration verwendet werden. Die folgenden Signalgruppen sind für den Einsatz vordefiniert: • Eingangssignale 1033 bis 1064 • Ausgangssignale 0033 bis 0064 Adept SmartController Betriebsanleitung, Rev. E... -
Seite 102: Ändern Der Standard-Sdio-Konfiguration
In diesem Fall wählen Sie in CONFIG_C.V2 die Blocknummer aus und weisen ihr die Ein- und Ausgangssignale zu. Zuweisen von sDIO-Signalblöcken 1. Laden Sie das Dienstprogramm CONFIG_C.V2 und führen Sie es aus. 2. Wählen Sie Option 6. 6 - Configure 1394 DIO Drücken Sie zum Fortfahren die Eingabetaste. Adept SmartController Betriebsanleitung, Rev. E... - Seite 103 Nachdem Sie die Blocknummern ausgewählt haben, müssen Sie allen Blöcken Signalnummerngruppen zuweisen. HINWEIS: Für jedes sDIO in Ihrem System müssen eindeutige Nummern für die Ein- bzw. Ausgänge ausgewählt werden. Wiederholen Sie die oben beschriebenen Schritte für jedes sDIO. Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 104: Zuweisen Von E/A-Signalnummern
9. Unterbrechen Sie die 24-V-Gleichspannungsversorgung des sDIO und stellen Sie sie wieder her. 10. Unterbrechen Sie die 24-V-Gleichspannungsversorgung des SmartController und stellen Sie sie wieder her. 11. Nehmen Sie die AdeptWindows PC-Verbindung oder serielle Verbindung mit dem SmartController wieder auf. Adept SmartController Betriebsanleitung, Rev. E... - Seite 105 SIGNAL 1081 = "/INPUT_BLOCK 17 /INPUT_BYTE 3 /IO_OPTIONAL YES" SIGNAL 1089 = "/INPUT_BLOCK 17 /INPUT_BYTE 4 /IO_OPTIONAL YES" Die Ausgangssignale werden entsprechend zugewiesen. Weitere Informationen hierzu finden Sie im Abschnitt zum Programm CONFIG_C im Handbuch Instructions for Adept Utility Programs. Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 106: A.4 Verwenden Mehrerer Sdio-Module
*S/N 3561-XXXXX* Adept IEEE-1394 Device Net Eth 10/100 RS-232/TERM RS-422/485 1 2 3 4 SmartController XDIO XUSR XSYS XMCP XDC1 XDC2 1394 Kabel 24 V Gleichspannung von vom Kunden bereitgestellter Stromversorgung Abbildung A-5. Verwenden mehrerer sDIO-Module Adept SmartController Betriebsanleitung, Rev. E... -
Seite 107: Konfigurieren Eines Systems Mit Einem Sdio Und Einem Rio
SmartServo-Anschlüsse am SmartController oder IEEE-1394-Anschlüsse an zusätzlichen sDIO-Geräten 3. Ausgang X1: D-Sub-Buchse (44 Pins) für digitale Ausgangssignale 0033-0048 4. Ausgang X2: D-Sub-Buchse (44 Pins) für digitale Ausgangssignale 0049-0064 5. Eingang X3: D-Sub-Buchse (26 Pins) für digitale Eingangssignale 1033-1048 Adept SmartController Betriebsanleitung, Rev. E... -
Seite 108: A.6 Digitale E/A-Signale Des Sdio
HINWEIS: Die Signale an den sDIO-Anschlüssen können von einem anderen sDIO gestört werden, wenn dieses ebenfalls als sDIO 1 installiert und gekennzeichnet wird. Zur gleichzeitigen Verwendung zweier sDIO-Module bezeichnen Sie das erste sDIO 1 und das zweite als sDIO 2. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 109: Sdio-Eingänge
16 ms Scan-Zyklus/ 32 ms max. Reaktionszeit Abschalt-Reaktionszeit (Hardware) 5 µs Maximum Software-Scanrate/-Reaktionszeit 16 ms Scan-Zyklus/ 32 ms max. Reaktionszeit HINWEIS: Die Strombereichspezifikationen dienen ausschließlich zu Referenzzwecken. Zum Betreiben der Eingänge werden üblicherweise Spannungsquellen verwendet. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 110: Abbildung A-7. Typische Sdio-Eingangsverdrahtung
Leckstrom der sDIO-Ausgänge. Dadurch wird gewährleistet, dass die Eingänge nicht durch den Leckstrom der Ausgänge aktiviert werden. Dies ist besonders in Installationen sinnvoll, in denen die Eingänge zur Überwachung auf die Eingänge zurückgeleitet werden. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 111: Sdio-Ausgänge
• Ein erweiterter Ausgang (beispielsweise ein SIGNAL zwischen 33 und 64) wurde durch einen V -Befehl aktiviert. • Ein aktivierter Ausgang ist aufgrund eines Kurzschlusses in der vom Benutzer angebrachten Verdrahtung zwischen Ausgabe-Pin und Schutzerde überhitzt. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 112: Auswahl Der Stromzufuhr Für Sdio-Ausgänge
Bei einem übermäßigen Spannungsabfall können Sie weitere (bis zu insgesamt neun) Stromversorgungs-Pins anschließen. Die Schutzerdung sollte direkt mit der Stromzufuhr und nicht mir der Erdverbindung der Last verbunden werden. Dadurch wird die Karte von möglichen Spannungsabfällen in der Erdrückleitung für die Last isoliert. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 113: Tabelle A-4. Stromkreisspezifikationen Von Sdio-Ausgängen
≤ 4 A Kurzschluss-Spitzenstrom ovpk VORSICHT: Die hier angegebenen Spezifikationen beziehen sich ausschließlich auf die Ausgangskanäle in den sDIO-Modulen. Informationen zu den Spezifikationen der digitalen Ausgangskanäle bei XDIO-Anschlüssen finden Sie in Tabelle 3-11 auf Seite Adept SmartController Betriebsanleitung, Rev. E... -
Seite 114: Abbildung A-8. Typische Sdio-Ausgangsverdrahtung
Signal 0044 Last Signal 0045 Last Signal 0046 Last Signal 0047 Last Signal 0048 Last Ausgangsgruppe 3 Signale 0049 - 0056 Digitaler Adept-Ausgang Kabel (optional) Ausgangsgruppe 3 Signale 0057 - 0064 Abbildung A-8. Typische sDIO-Ausgangsverdrahtung Adept SmartController Betriebsanleitung, Rev. E... -
Seite 115: Optionale Dio-Kabel
Kabeln bestellt werden: zwei Eingangs- und zwei Ausgangskabel. Diese Kabel sind mit einem Steckverbinder an einem und freien Kabelenden am anderen Ende ausgestattet. Der Drahtquerschnitt der Adept-Kabel beträgt 0,18 mm . Mit diesen Kabeln können Sie die digitalen Ein- und Ausgänge in Ihrem System verbinden oder einen Verdrahtungsblock anschließen. -
Seite 116: Informationen Zur Eingangs- Und Ausgangsverkabelung
X3-11 1043 Orange/Schwarz X3-2 1044 Weiß Eingangsbuchse X3, X3-12 1045 Blau/Schwarz 26 Pins, an Vorderseite X3-3 1046 des sDIO X3-13 1047 Schwarz/Weiß X3-4 1048 Grün Rückleiter X3-19 Weiß/Rot Gruppe 2 Rückleiter X3-20 Orange/Rot Gruppe 2 Adept SmartController Betriebsanleitung, Rev. E... -
Seite 117: Tabelle A-6. Pinbelegung Für Eingangskabel X4
X4-11 1059 Orange/Schwarz Eingangsbuchse X4, X4-2 1060 Weiß 26 Pins, an Vorderseite des sDIO X4-12 1061 Blau/Schwarz X4-3 1062 X4-13 1063 Schwarz/Weiß X4-4 1064 Grün Rückleiter X4-19 Weiß/Rot Gruppe 4 Rückleiter X4-20 Orange/Rot Gruppe 4 Adept SmartController Betriebsanleitung, Rev. E... -
Seite 118: Tabelle A-7. Pinbelegung Für Ausgangskabel X1
Schwarz/Rot X1-18 Stromzufuhr Weiß/Rot X1-19 Stromzufuhr Orange/Rot X1-31 Stromzufuhr Orange/Schwarz/Weiß X1-32 Stromzufuhr Blau/Schwarz/Weiß X1-33 Stromzufuhr Schwarz/Rot/Grün X1-34 Stromzufuhr Weiß/Rot/Grün X1-35 Stromzufuhr Rot/Schwarz/Grün X1-36 Stromzufuhr Grün/Schwarz/Orange Rückleiter X1-21 Blau/Rot Gruppe 2 Prüfleiter X1-22 Rot/Grün Gruppe 2 Adept SmartController Betriebsanleitung, Rev. E... -
Seite 119: Tabelle A-8. Pinbelegung Für Ausgangskabel X2
Schwarz/Rot X2-18 Stromzufuhr Weiß/Rot X2-19 Stromzufuhr Orange/Rot X2-31 Stromzufuhr Orange/Schwarz/Weiß X2-32 Stromzufuhr Blau/Schwarz/Weiß X2-33 Stromzufuhr Schwarz/Rot/Grün X2-34 Stromzufuhr Weiß/Rot/Grün X2-35 Stromzufuhr Rot/Schwarz/Grün X2-36 Stromzufuhr Grün/Schwarz/Orange Rückleiter X2-21 Blau/Rot Gruppe 4 Prüfleiter X2-22 Rot/Grün Gruppe 4 Adept SmartController Betriebsanleitung, Rev. E... - Seite 120 Anhang A - sDIO-Modul Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 121: Adept Devicenet
Geräten und wichtige Diagnosen auf Geräteebene, die mit fest verdrahteten E/A-Schnittstellen nicht verfügbar sind. DeviceNet-Spezifikationen Adept Technology ist Mitglied der Open DeviceNet Vendor Association (ODVA), einer unabhängig geführten und betriebenen Vereinigung, die nicht direkt mit einem bestimmten Unternehmen verbunden ist. Die ODVA verwaltet die technischen Spezifikationen von DeviceNet mithilfe von Interessengruppen, so genannten Special Interest Groups (SIGs). -
Seite 122: Einschränkungen Des Adept Devicenet Scanner
• Unconnected Message Manager (UCMM) zum Herstellen von Verbindungen in den DeviceNet Scanner implementiert. • UCMM wird zum Herstellen von E/A-Verbindungen verwendet. • Der Adept DeviceNet Scanner kann im Netzwerk als Client oder als Server fungieren. • Der Adept DeviceNet Scanner unterstützt derzeit keine Verbindungen des Typs Cyclic oder Change-of-State. -
Seite 123: Anschließen Von Devicenet-Hardware An Den Adept Devicenet Scanner
Physikalischer Layer von DeviceNet und Medien Anschließen von DeviceNet-Hardware an den Adept DeviceNet Scanner Um DeviceNet-Komponenten mit dem Adept DeviceNet Scanner zu verbinden, schließen Sie eine Abzweigleitung an die DIN-Mikrobuchse mit 12-mm-Gewinde auf der Vorderseite des SmartController an. Konfigurieren Sie nun den DeviceNet Scanner... -
Seite 124: Abbildung B-1. Haupt- Und Abzweigleitungen Aus Thick Cable Bzw. Thin Cable
CONFIG_C im Dienstprogramm vornehmen. Diese Änderungen werden erst nach einem Neustart des Adept SmartController aktiv. Die Spannungsverteilung im Netzwerk bzw. auf dem Bus muss nicht zentral geschehen. Die Verteilung der Spannungsversorgung muss aufgrund bestimmter Einschränkungen gut geplant werden. Allgemein gilt, dass die Spannungsversorgungen an einer beliebigen Stelle im Netzwerk positioniert sein können. -
Seite 125: Tabelle B-2. Funktionen Eines Devicenet-Netzwerks
Busadressierung Multi-Master und Master/Slave (mit Polls) Systemfunktionen Das Entfernen und Ersetzen von Geräten im Netzwerk im laufenden Betrieb wird von Adept nicht unterstützt. Die Baudrate des Systems hängt von der Gesamtlänge des Netzwerks und dem verwendeten Kabeltyp ab. Tabelle B-3 zeigt, wie die verwendeten Kabel und die Länge... -
Seite 126: Abbildung B-2. Devicenet-Kabel Mit Großem Durchmesser
Anhang B - Adept DeviceNet Durchmesser außen: 11 mm Abschirmung: Geflecht aus verzinntem Kupfer (65% Deckung) Füllstoff (Polypropylen) Außenmantel Blau-weißes Datenpaar (Polyäthylen, 18 AWG 19 x 30 Drahtlitzenleiter aus verzinntem Kupfer) Aluminium/Mylar-Schirmung (jedes Paar) Rot-blaues Gleichspannungspaar (PVC, 15 AWG 18 AWG 19 x 30 Litzenableiter... -
Seite 127: Devicenet-Anschlüsse
• Verhindert die Reflexion von Datenübertragungssignalen im Netzwerk. • Verbindet die beiden Signalleitungen. • Muss geschlossen sein, wenn der Endknoten ein geschlossenes T-Stück verwendet. • Muss offen sein, wenn der Endknoten eine offene Abzweigung verwendet. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 128: Spannungsversorgung Und Der Devicenet-Bus
• Stellen Sie sicher, dass alle Spannungsversorgungen temperatur- kompensiert sind. • Schützen Sie jeden Abschnitt der DeviceNet-Kabelinstallation vor Überstrom. HINWEIS: Die 24-V-Spannungsversorgung für den Betrieb des DeviceNet-Busses des SmartController oder anderer Adept-Komponenten ist nicht im Lieferumfang enthalten. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 129: Leistung Der Stromversorgung In Einem Devicenet-Kabelsystems
Widerstand des Kabels gesenkt. Weitere Informationen hierzu finden Sie in Tabelle und den technischen Spezifikationen von DeviceNet. Tabelle B-5. Maximalstromstärke einer Abzweigleitung im Verhältnis zu ihrer Länge Länge der Abzweigleitung Maximalstromstärke 1,5 m 2,0 m 3,3 m 1,5 A 4,5m 0,75 A Adept SmartController Betriebsanleitung, Rev. E... - Seite 130 Anhang B - Adept DeviceNet Verwenden Sie die folgende Formel, um die Maximalstromstärke bei einer bestimmten Länge zu berechnen: 4,57 --------- - Hierbei gilt: l= Länge der Abzweigleitung in Metern (m) i= Maximalstromstärke in Ampere Diese Berechnung bezieht sich auf die Summe aller Ströme aller Knoten der entsprechenden Abzweiglinie.
-
Seite 131: Abbildung B-6. Pinbelegung Der Devicenet-Anschlüsse
Physikalischer Layer von DeviceNet und Medien (ANSICHT VON KONTAKTENDE) Stecker (Pins) Mikro- Anschluss Buchse (Pin-Eingänge) LEGENDE: 1 Drain (blank) 2 V+ (rot) 3 V- (schwarz) 4 CAN_H (weiß) 5 CAN_L (blau) Abbildung B-6. Pinbelegung der DeviceNet-Anschlüsse Adept SmartController Betriebsanleitung, Rev. E... - Seite 132 Anhang B - Adept DeviceNet Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 133: Verwendung Des Handbediengeräts (Mcp)
Verwendung des Handbe- diengeräts (MCP) C.1 Grundlagen des Handbediengeräts (MCP) Adept-Bewegungssysteme sind zum Steuern eines Roboters oder Bewegungsgeräts vom Handbediengerät (Manual Control Pendant - MCP) ausgelegt. Abbildung C-2 auf Seite zeigt, wie das MCP gehalten wird. Es gibt zwei Versionen des MCP, MCP III (auch MCP-3) und MCP-4. -
Seite 134: Mcp-4
Position 3: Der Schalter ist ganz gedrückt (weiter als mittlere Position) und die Antriebsleistung wird getrennt. (Schalter ist offen.) Position 3: Position 1: Position 2: Schalter gedrückt Schalter Schalter gedrückt (mehr als Mittelposition) nicht gedrückt (Mittelposition) Abbildung C-1. 3-stufiger Zustimmungsschalter auf MCP-4 Adept SmartController Betriebsanleitung, Rev. E... -
Seite 135: Mcp-4-Kompatibilität
Systemen keine Kompatibilitätsprobleme. Wenn Sie ein MCP-4 in einem System einrichten, in dem ursprünglich ein MCP III verwendet worden war, empfiehlt Adept, den CIM TO MCPIII-Adapter (Teilenr.: 10356-10370) zu entfernen. Diese Vorgehensweise empfiehlt sich aus Gründen der Zuverlässigkeit, nicht aus Gründen der Einhaltung des Standards. -
Seite 136: Abbildung C-2. Halten Des Mcp
Abbildung C-2. Halten des MCP PROG EDIT DISP WORLD TOOL JOINT FREE USER MAIN HALT COMP HOLD SLOW DONE – J 7 J • STEP Clip der MCP-Halterung Abbildung C-3. Anbringen des MCP in der Halterung Adept SmartController Betriebsanleitung, Rev. E... -
Seite 137: Anschließen Des Mcp
Tun Sie dies trotzdem, erlischt die Garantie auf das MCP-Gerät. WARNUNG: Der Manuell/Auto-Schlüsselschalter auf der Adept-Bedienkonsole muss auf Handbetrieb gestellt werden, wenn das MCP innerhalb der Arbeitszelle des Roboters verwendet werden soll. Dadurch werden wichtige Sicherheitsfunktionen zum Schutz des Bedienpersonals aktiviert, indem die Geschwindigkeit des Roboters beschränkt wird. -
Seite 138: Bedienelemente Auf Dem Mcp
Zeile der LCD-Anzeige auf dem Handgerät angezeigt. Da diese Tasten keine feststehenden Bezeichnungen haben (diese werden durch das jeweils verwendete Programm definiert), werden sie als „Multifunktionstasten“ bezeichnet. (Die Programmierung des MCP wird im V+ Language User’s Guide behandelt.) Abbildung C-4 sind die Multifunktionstasten zu sehen. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 139: Funktionstasten
Die Tasten zur Steuerung des Betriebsmodus und zur Steurung der Gelenke/Achsen werden zur Steuerung des Roboters vom Handbediengerät aus verwendet. Die Verwendung dieser Tasten wird im Abschnitt „Bewegen eines Roboters oder Bewegungsgeräts mit dem MCP“ auf Seite 149 behandelt. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 140: Tasten Zur Geschwindigkeitsregelung Und Slow-Taste
CAT-3 SmartController (Seriennummer 1000-xxxxx oder 2000-xxxxx) Bei Verwendung des CAT-3-SmartController im Automatikbetrieb wird der Zustimmungsschalter vom System ignoriert. Das Loslassen des Zustimmungsschalters hat keine Auswirkung auf den Betrieb des Systems. Weitere Informationen finden Sie in Abschnitt 1.6 auf Seite Adept SmartController Betriebsanleitung, Rev. E... -
Seite 141: Im Handbetrieb
Wenn sich das MCP im Hintergrundmodus befindet, kann der Betrachtungswinkel für die LCD-Anzeige geändert werden. Es gibt drei unterschiedliche Betrachtungswinkel. Drücken Sie zur Auswahl einer der drei Betrachtungswinkel die Tasten „2“, „5“ oder „8“. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 142: C.2 Vordefinierte Funktionen Des Mcp
Das MCP besitzt fünf vordefinierte Funktionstasten, die dem Benutzer zur Verfügung stehen. Diese fünf Tasten werden anschließend aufgeführt und erläutert. PROG EDIT DISP USER WORLD TOOL JOINT FREE Abbildung C-6. Vordefinierte Funktionstasten auf dem MCP Adept SmartController Betriebsanleitung, Rev. E... -
Seite 143: Die Bearbeitungsfunktion
CHANGE TRUE FALSE Der Variablenwert wird durch die Eingabemarke (Unterstrich) ersetzt. Geben Sie mithilfe der Tasten für die Dateneingabe einen neuen Wert ein und schließen Sie Ihre Eingabe ab, indem Sie die Taste REC/DONE drücken. Adept SmartController Betriebsanleitung, Rev. E... - Seite 144 Drücken Sie die Multifunktionstaste HERE, um die aktuelle Roboterposition in der gerade bearbeiteten Variablen zu speichern. WARNUNG: Seien Sie äußerst vorsichtig, wenn Sie Positionswerte ändern. Wenn sich der Roboter zu einer geänderten Position hinbewegt, kann dies zu Schäden an der Ausrüstung in der Arbeitszelle führen. Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 145: Die Anzeigefunktion
Weltkoordinaten dar. Weitere Informationen über Weltkoordinaten finden Sie in Abschnitt C.3 auf Seite 149. STATUS & ID Wenn diese Taste gedrückt wird, zeigt die Anzeige Folgendes an: Status SOFTWARE CNTRLR ROBOT ’S Die STATUS-Taste zeigt Folgendes an: program.name Program Speed Cycle Left Adept SmartController Betriebsanleitung, Rev. E... -
Seite 146: Die Funktion Zum Löschen Von Fehlermeldungen
MCP gesendet wird, wird ein Warnton ausgegeben, eine blinkende Fehlermeldung angezeigt und die LED der CLR ERR-Taste leuchtet (siehe Abbildung C-9). *EXTERNES NOT-AUS* PROG EDIT DISP WORLD TOOL JOINT FREE USER Abbildung C-9. CLR ERR-Funktionstaste Adept SmartController Betriebsanleitung, Rev. E... -
Seite 147: Die Cmd-Funktion
Programm mit dem korrekten Namen enthält, wird der Vorgang abgebrochen und eine entsprechende Fehlermeldung auf der LCD ausgegeben. Wenn Sie beispielsweise die Ziffer „9“ eingegeben haben, versucht das System, die Datei AUTO9.V2 zu laden und COMMAND das Programm „auto9“. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 148: Prog Set-Funktion
<MORE> Um ein anderes Programm auszuwählen, drücken Sie die Multifunktionstasten unter dem Programmnamen in der Anzeige. Um sich weitere Programme (sofern vorhanden) anzeigen zu lassen, drücken Sie die Multifunktionstaste für <MORE>. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 149: Bewegen Eines Roboters Oder Bewegungsgeräts Mit Dem Mcp
Programmierroutinen einsetzen, die die Ausführung des Programms an bestimmten Punkten unterbrechen und es dem Betriebspersonal erlauben, die vom Programm verwendeten Roboterpositionen wiederholt zu programmieren. Das Adept AIM-Softwaresystem stützt sich sehr stark auf das Handbediengerät, wenn es um die Programmierung der Roboterpositionen geht. -
Seite 150: Tasten Zur Steuerung Des Betriebsmodus
Antriebsleistung die COMP/PWR-Taste drücken, müssen Sie folgende Schritte ausführen: • Lassen Sie den Zustimmungsschalter des MCP los. • Halten Sie den Zustimmungsschalter des MCP gedrückt (Position 2 auf dem MCP-4). • Drücken Sie die Taste für die Antriebsleistung innerhalb des zulässigen Zeitraums. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 151: Man/Halt-Taste
Programm bis zum Loslassen der Taste fortgesetzt. Wenn Sie die Taste loslassen wird der Roboter angehalten und das ausgeführte Programm wird bis zum erneuten Drücken der Taste unterbrochen. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 152: Tasten Zur Steuerung Von Gelenken/Achsen
Geschwindigkeitsregelung mit dem linken Daumen. Wenn Sie auf die äußeren Enden dieser Tasten drücken, bewegt sich der Roboter schneller und wenn Sie näher an der Mitte drücken, bewegt er sich langsamer. Informationen über positive und negative Richtungen finden Sie auf Seite 153. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 153: Im Computermodus
Abbildung C-14 abgebildet. Wenn X1 ausgewählt ist, wird der Werkzeugflansch des Roboter mit der „+“-Taste zur Geschwindigkeitsregelung in die positive X-Richtung bewegt. Wenn Sie die „–“-Taste zur Geschwindigkeitsregelung drücken, bewegt sich der Werkzeugflansch in negativer X-Richtung. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 154: Tool-Zustand
Roboter-Werkzeugflanschs, wobei die Z-Achse vom Flansch wegzeigt. Bei den meisten Robotern verläuft die positive X-Achse entlang der Mitte der Keilnut des Werkzeugflanschs. Bevor der Roboter mithilfe der Tasten zur Geschwindigkeitsregelung bewegt werden kann, muss mit den Tasten zur manuellen Adept SmartController Betriebsanleitung, Rev. E... - Seite 155 Werkzeugkoordinatensystem um den Wert der TOOL-Transformation verschoben und gedreht. Jede Bewegung im TOOL-Zustand wird nun relativ zum verschobenen Koordinatensystem und nicht mehr zur Mitte des Werkzeugflanschs vorgenommen. Weitere Informationen zu TOOL-Transformationen finden Sie im V+ Language Reference Guide. Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 156: Abbildung C-15. Tool-Zustand (Scara-Roboter Mit Vier Achsen)
Anhang C - Verwendung des Handbediengeräts (MCP) X-Richtung Y-Richtung Z-Richtung Drehung um Z-Achse des Werkzeugs Keilnut Greifer STEP Abbildung C-15. TOOL-Zustand (SCARA-Roboter mit vier Achsen) Adept SmartController Betriebsanleitung, Rev. E... -
Seite 157: Abbildung C-16. Tool-Zustand (Scara-Roboter Mit Sechs Achsen)
Bewegen eines Roboters oder Bewegungsgeräts mit dem MCP Drehung um X-Achse des Werkzeugs Drehung um Y-Achse des Werkzeugs Drehung um Z-Achse des Werkzeugs Greifer STEP Abbildung C-16. TOOL-Zustand (SCARA-Roboter mit sechs Achsen) Adept SmartController Betriebsanleitung, Rev. E... -
Seite 158: Joint-Zustand
Abbildung C-17 zeigt einen SCARA-Roboter von Adept mit drei Drehgelenken (Gelenke 1, 2 und 4) und einem Schubgelenk (Gelenk 3). Die positive Drehrichtung für die Gelenke 1 und 2 ist von oben gesehen der Gegenuhrzeigersinn. Die positive Drehrichtung für das Gelenk 4 ist von oben gesehen der Uhrzeigersinn. -
Seite 159: Free-Zustand
Steuerung eine andere Auswahl treffen, sind alle Gelenke wieder servogesteuert und können nicht frei bewegt werden. Abbildung C-19 zeigt den FREE-Zustand für einen SCARA-Roboter mit vier Achsen. Die Gelenkzuweisungen im FREE-Zustand sind dieselben wie die im JOINT-Zustand. Adept SmartController Betriebsanleitung, Rev. E... -
Seite 160: Steuerung Von Mehr Als Einem Roboter
MCP ausgewählten Roboter entnehmen Sie dem Zustand der DEV-LED (in der LED-Gruppe für die Anzeige von Zuständen im Handbetrieb, siehe Abbildung C-4). Die folgende Tabelle beschreibt die möglichen Zustände der DEV-LED und was sie anzeigen: Adept SmartController Betriebsanleitung, Rev. E... -
Seite 161: Roboter Mit Weniger Als Sechs Gelenken
Zustand der LED für Gelenkbereich Gelenke/Achsen Leuchtet nicht Keine Leuchtet permanent 1 bis 6 Blinkt 7 bis 12 Jedes Mal, wenn Sie die F2/J7-J12-Taste drücken, schaltet die MCP-Auswahl von einem Gelenkbereich auf den anderen um. Adept SmartController Betriebsanleitung, Rev. E... - Seite 162 Anhang C - Verwendung des Handbediengeräts (MCP) Adept SmartController Betriebsanleitung, Rev. E...
-
Seite 163: Stichwortverzeichnis
Externe Erfassung der Not-Aus-Schalter (Benutzer) Betriebsmodusschalter auf Bedienkonsole Externe MCP-Verbindungen des XMCP- Bildoption, siehe sAVI-Option Anschlusses CAT-3-SmartController Fehler Änderung bei SmartModule- Systemen auf MCP anzeigen Beschreibung Fließband-Encoder-Anschluss auf CX Funktionsbereich des MCP- Beschreibung Zustimmungsschalters Pinbelegung Kennzeichnung Not-Aus-Diagramm Adept SmartController Betriebsanleitung, Rev. E... -
Seite 164: Prog Set-Funktion
Konfigurieren eines einzelnen sDIO Positionsvariablen Kundendienst mit MCP bearbeiten Präzisionspunkt (Anzeige auf MCP) PROG SET-Funktion LED für System-Strom-Anzeige auf auf dem MCP Bedienkonsole Programm Auführung starten (MCP) Lizenz für V+-Erweiterungen zur Nutzung der Fließband-Encoder-Funktion Adept SmartController Betriebsanleitung, Rev. E... - Seite 165 RS-422/485-Anschluss Beschreibung Pinbelegung sAVI Inspection System Beschreibung Einschränkungen sAVI-Option Kamerakabel 74–87 Kamerakompatibilität technische Spezifikationen unterstützte Kameras Schalttafeleinbau sDIO SmartController Schnelle Eingangssignale (1001 bis 1004) Schritt (Auswahl für Start, auf MCP) sDIO-Modul Anschlüsse Ausgänge testen Einbauoptionen Adept SmartController Betriebsanleitung, Rev. E...
- Seite 166 Wenn Sie Fragen haben XDC1- und XDC2-Anschluss (24 V, Beschreibung) XDIO-Anschluss Ausgangssignale Beschreibung digitale Ausgänge verdrahten Eingangssignale Funktionen 61–67 XFP-Anschluss (SmartController) Beschreibung Kontakte XFP-Anschluss auf Bedienkonsole (Beschreibung) XMCP-Anschluss Beschreibung externe MCP-Verbindungen XSYS-Anschluss (Beschreibung) XUSR-Anschluss Beschreibung Kontakte 50–51 Adept SmartController Betriebsanleitung, Rev. E...
- Seite 168 3011 Triad Drive Livermore, CA 94551, USA 925•245•3400 P/N: 00356-00101, Rev.A...